





实战视频演示: 基于机器视觉的智能分拣机械臂

前言
本作品是一个基于机器人机器视觉的智能机械臂操作平台,其采用atmega32单片机作为主控制系统并通过串口与视觉识别模块进行通讯;控制系统使用12V5A开关电源供电;机械臂是一个六关节机械臂,六个伺服电机分别驱动六个关节转动,主控制系统控制六个伺服电机实现机械臂空间复杂运动。该智能平台实现了,对不同大小,颜色,二维码等目标物品的识别,按指令进行分类、抓取、搬移等动作。

该作品制作稍微复杂,但并不困难。机械臂控制代码可通过图形化软件来生成,没有难度,机器视觉则由集成度很高的图像处理器OpenMV来负责,只需要调用官方的API,很轻松地就能实现机器视觉。整个作品花些心思即可完成。
材料
MG996R 996 舵机 *6
长U型支架单轴舵机支架 *3
U型梁 *2
S3115通用支架 *5
L型支架单轴 *1
金属 机械手臂 夹持器 *1
M3螺丝螺母若干
35步进电机 *1
M8丝杆20cm *2
联轴器5X8 *1
丝杆固定轴承 *4
A4纸 *1
A4988驱动板 *1
ARDUINO PRO MINI *1
12V1A电源 *1
OPENMV *1
步骤
一、机械臂部分
1、组装
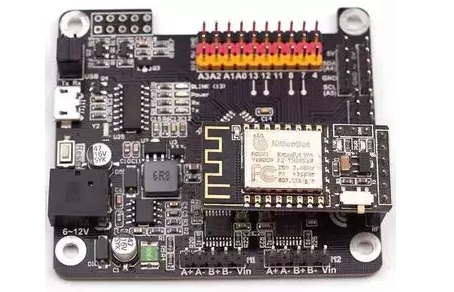
2、驱动板
驱动板用的KittenBot家的RosBot机器人开发板,图像化编程还是很好用的。
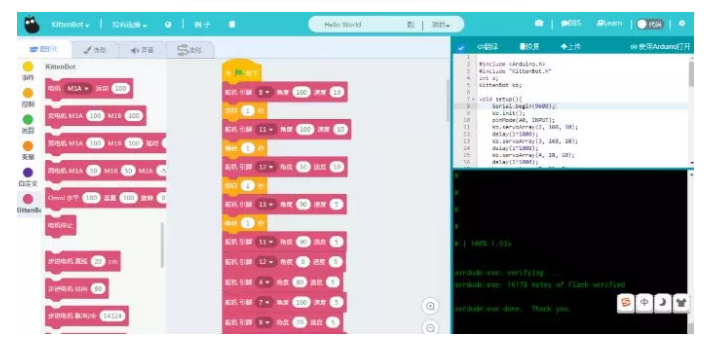
3、程序
void setup(){
Serial.begin(9600);
kb.init();
pinMode(A0, INPUT);
kb.servoArray(2, 160, 10);
delay(1*1000);
kb.servoArray(3, 160, 10);
delay(1*1000);
kb.servoArray(4, 10, 10);
delay(1*1000);
kb.servoArray(5, 90, 5);
delay(1*1000);
kb.servoArray(3, 90, 10);
kb.servoArray(4, 10, 10);
kb.servoArray(0, 90, 10);
kb.servoArray(1, 70, 10);
kb.servoArray(2, 70, 10);
kb.servoArray(3, 80, 10);
delay(1*1000);
kb.servoArray(5, 180, 10);
delay(3*1000);
}
void loop(){
char val = Serial.read();
if(val == '1'){
delay(1*1000);
kb.servoArray(0, 125, 10);
delay(1*1000);
kb.servoArray(2, 130, 20);
kb.servoArray(4, 20, 20);
kb.servoArray(5, 145, 5);
delay(1*1000);
kb.servoArray(1, 160, 20);
delay(2*1000);
kb.servoArray(0, 100, 20);
delay(2*1000);
kb.servoArray(4, 10, 10);
kb.servoArray(0, 90, 10);
kb.servoArray(1, 70, 10);
kb.servoArray(2, 70, 10);
kb.servoArray(3, 80, 10);
delay(1*1000);
kb.servoArray(5, 180, 10);
}
if(val == '2'){
delay(1*1000);
kb.servoArray(0, 125, 10);
delay(1*1000);
kb.servoArray(4, 30, 10);
kb.servoArray(3, 135, 10);
delay(1*1000);
kb.servoArray(5, 130, 10);
kb.servoArray(2, 70, 10);
delay(1*1000);
kb.servoArray(1, 160, 20);
delay(2*1000);
kb.servoArray(0, 100, 20);
delay(2*1000);
kb.servoArray(4, 10, 10);
kb.servoArray(0, 90, 10);
kb.servoArray(1, 70, 10);
kb.servoArray(2, 70, 10);
kb.servoArray(3, 80, 10);
kb.servoArray(5, 180, 10);
}
if(val == '3'){
delay(1*1000);
kb.servoArray(0, 120, 10);
delay(1*1000);
kb.servoArray(4, 20, 10);
kb.servoArray(3, 130, 10);
delay(1*1000);
kb.servoArray(5, 115, 10);
kb.servoArray(2, 55, 10);
delay(1*1000);
kb.servoArray(1, 160, 20);
delay(2*1000);
kb.servoArray(0, 100, 20);
delay(2*1000);
kb.servoArray(4, 10, 10);
kb.servoArray(0, 90, 10);
kb.servoArray(1, 70, 10);
kb.servoArray(2, 70, 10);
kb.servoArray(3, 80, 10);
kb.servoArray(5, 180, 10);
}
}
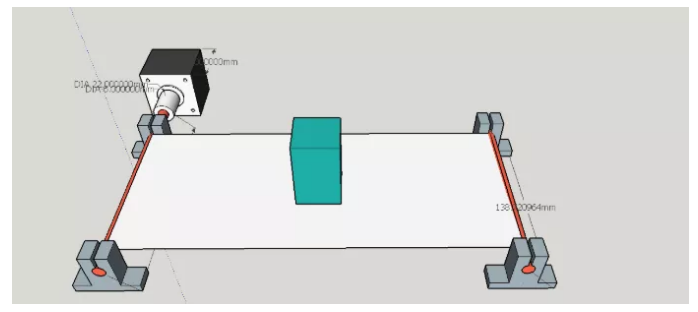
二、传送带部分
1、结构图
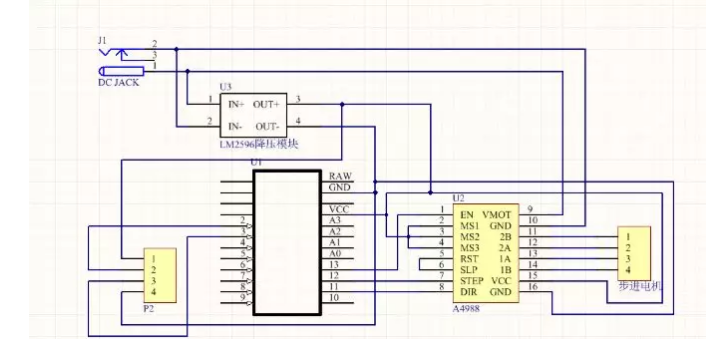
2、驱动电路
3、程序
#include <Servo.h>
Servo servo1;
void setup() {
servo1.attach(5);
Serial.begin(9600);
}
void loop() {
int angle = analogRead(A0);
angle = map(angle, 0, 1023, 0, 180);
Serial.print("angle = ");
Serial.println(angle);
servo1.write(angle);
delay(15);
}
三、视觉部分
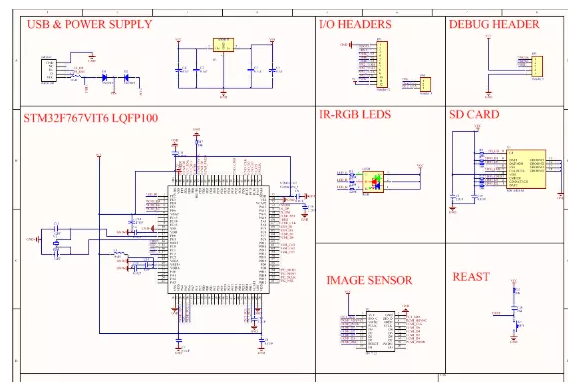
视觉模块是参考开源的OPENMV绘制的PCB,采用基于OPENMV的图像识别模块,主控为STM32F767,工作频率可达260MHZ,摄像头使用0V7725,30W像素。机器视觉识别系统的主控芯片STM32F767通过串口通信方式与主控制系统ATMEGA32单片机传输信息
1、原理图
2、AprilTag标签识别原理
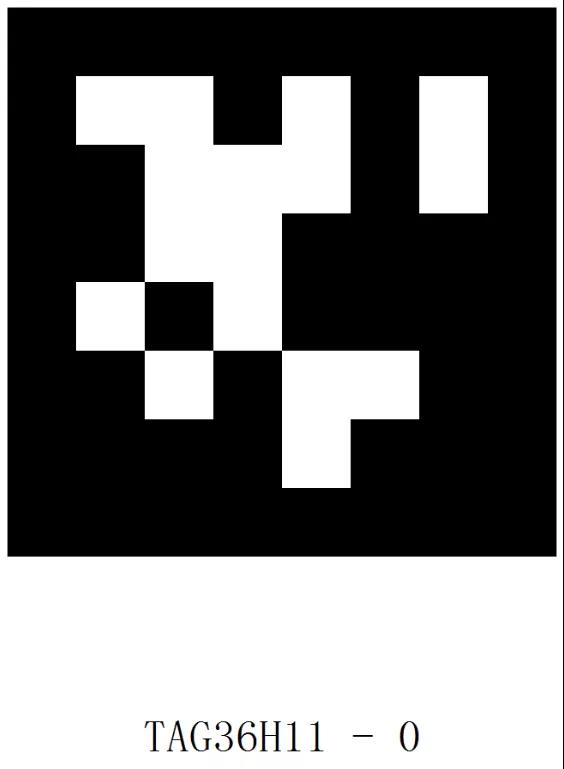
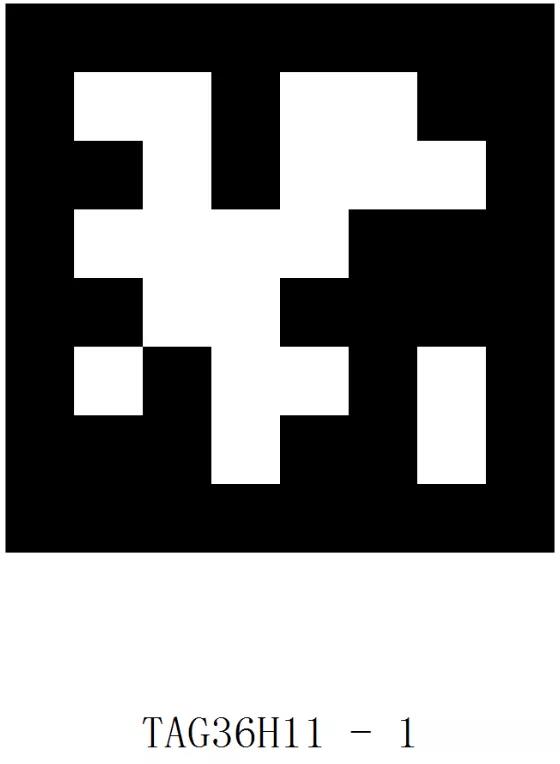
AprilTag是一个视觉基准系统,可用于各种任务,包括AR,机器人和相机校准。这个Tag可以直接用打印机打印出来,而AprilTag检测程序可以计算相对于相机的精确3D位置,方向和ID。在机器人领域有广泛应用。AprilTag的算法,可以计算出Tag在3维空间中的位置, 与其对应的ID。
3、颜色识别功能
颜色识别是通过识别指定物品的色块,返回色块的值给主控,主控再根据返回的信息控制机械臂执行相应的动作。
4、程序
①标签识别
import sensor, image, time, math
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA) # we run out of memory if the resolution is much bigger...
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must turn this off to prevent image washout...
sensor.set_auto_whitebal(False) # must turn this off to prevent image washout...
clock = time.clock()
tag_families = 0
tag_families |= image.TAG16H5 # comment out to disable this family
tag_families |= image.TAG25H7 # comment out to disable this family
tag_families |= image.TAG25H9 # comment out to disable this family
tag_families |= image.TAG36H10 # comment out to disable this family
tag_families |= image.TAG36H11 # comment out to disable this family (default family)
tag_families |= image.ARTOOLKIT # comment out to disable this family
def family_name(tag):
if(tag.family() == image.TAG16H5):
return "TAG16H5"
if(tag.family() == image.TAG25H7):
return "TAG25H7"
if(tag.family() == image.TAG25H9):
return "TAG25H9"
if(tag.family() == image.TAG36H10):
return "TAG36H10"
if(tag.family() == image.TAG36H11):
return "TAG36H11"
if(tag.family() == image.ARTOOLKIT):
return "ARTOOLKIT"
while(True):
clock.tick()
img = sensor.snapshot()
for tag in img.find_apriltags(families=tag_families): # defaults to TAG36H11 without "families".
img.draw_rectangle(tag.rect(), color = (255, 0, 0))
img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0))
print_args = (family_name(tag), tag.id(), (180 * tag.rotation()) / math.pi)
print("Tag Family %s, Tag ID %d, rotation %f (degrees)" % print_args)
print(clock.fps)
②颜色识别
import sensor, image, time
thresholds = [(0, 100, 51, 127, -3, 127), # generic_red_thresholds
(0, 100, -128, -19, -128, 127), # generic_green_thresholds
(39, 100, -63, 13, -128, -16)] # generic_blue_thresholds
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
for blob in img.find_blobs(thresholds, pixels_threshold=800, area_threshold=1500):
img.draw_rectangle(blob.rect(), color = (255, 0, 0))#red
img.draw_string(100,100,'red', color=(255,0,0))
img.draw_cross(blob.cx(), blob.cy())
整个过程比较复杂,但完成之后就只剩下满满的成就感,感兴趣的试一试吧!

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2017-08-22 03:25:08
- 2017-08-23 07:34:42
- 2017-08-23 05:10:24
- 2017-08-23 07:28:23
- 2017-02-24 03:14:48
- 2017-08-23 07:31:50
- 2022-09-21 10:03:03
- 2022-09-28 15:16:41
- 2024-03-24 11:04:05
- 2022-10-31 11:29:12
- 2022-08-25 11:11:08
- 2023-08-16 13:15:03
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









