




【方案分享】工业机器人洁具自动磨抛工作站方案(下篇)

【方案分享】工业机器人洁具自动磨抛工作站方案(上)
1.5 系统评估
经过简单实验,对系统进行了初步评估,结果如下:
※系统加工周期: 305s
※上下料:10s
※去除工艺口:22
※磨削粗加工:85s
※磨削精加工:95s
※抛光加工:75s
※机器人中间调整时间:18s
※系统噪音度:<50(db)
2 系统组成介绍
2.1 机器人及控制柜
<a href="http://www.imrobotic.com/integrator/12197/index" target="_blank" title="库卡">KUKA机器人主要参数如下:
运动半径: 2033 mm
承载能力:30 kg
重复定位精度:0.15mm
自由度: 6 自由度
空气噪音度:在运动空间之外的噪音度: <70dB

2.2 自动水龙头卡具
※水龙头夹具位于机器人第六轴上,由智通公司根据水龙头的尺寸、重量、加工位置、工艺要求、定位面等因素特殊设计
※夹具夹紧元件采用气缸驱动,由定位销、定位面定位,由气动自动控制工件的抓取与释放
※配有气环,能够实现 6 轴气管无缠绕多角度旋转
※夹具的刚性要满足水龙头磨削抛光工艺的需求,有足够的夹紧力同时不损伤工件。
※夹具底座与机器人第六轴的连接方便可靠,便于装卸,以方便更换,实现柔性生产。

图 5 气动水龙头卡具的例子,因工件类型不一样,用于本系统的卡具会略有区别。
2.3 上下料工作台
上下料工作台由智通公司根据水龙头的外形、尺寸、定位面特殊设计,上下料区域分别可以安置多个水龙头,便于机器人连续作业。
工作台上有定位装置,保证系统重复精度;
工作台上有传感装置,用于检测是否有工件,保障机器人及工件安全。
图 6 根据具体工件及应用不同,工作台的设计会略有区别。

2.4 磨削系统
磨削系统由多台砂带磨削机组成,能够完成水龙头的粗磨、精磨及光整加工。磨削机主要具有以下特点:
※磨削速度可调
※可以改变接触轮位置
※具有在线力控制功能,克服系统重复误差
※具有灰尘收集装置
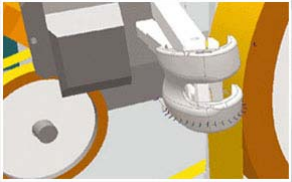
图 7 磨削机系统。

2.5 抛光系统
抛光系统由多台抛光机组成,能够完成水龙头的抛光。抛光机主要具有以下特点:
※抛光速度可调
※具有在线力控制功能,克服系统重复误差
※具有灰尘收集装置
※具有抛光液或抛光膏自动进给装置
图 8 为磨削抛光系统中应用的抛光机的例子:

2.6 三维扫描设备
三维扫描仪是一台高精度的线激光测量设备,在本系统中主要用于砂带机和叶片的校准。为了保证扫描仪的正常工作,为扫描仪设计了专门的固定装置和保护罩,能够保证扫描仪正常工作在磨削抛光这样的环境中。
图 9 为本公司设计的三维激光扫描单元,其工作特性如表 1 所示。

图 9:RobotScanH-200 三维激光扫描单元
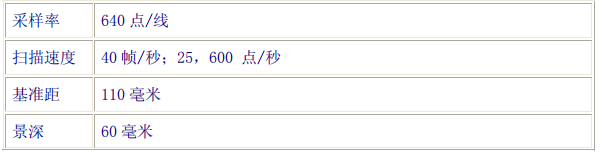
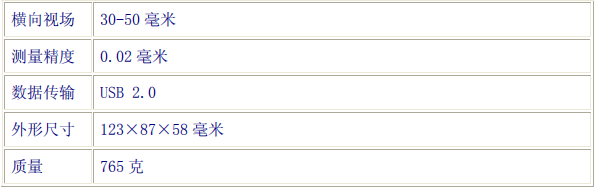
表 1:RobotScanH-200 三维激光扫描器工作特性
2.7 机器人工作间及底座
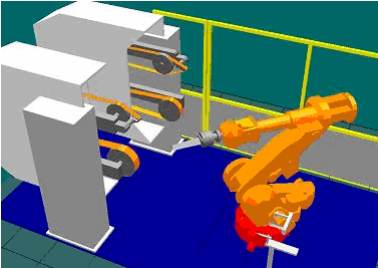
整个系统安装在一个安全护栏内,保证人身安全。图 10 为我公司一个工作间及底座的例子, 具体系统可以参考此系统的设计。

2.8 控制系统
系统由机器人控制柜和 PLC 控制柜进行控制和管理,系统的各种运行状态及报警信息可通过 LED 屏幕进行人机交互,控制系统具有自动控制、检测、保护、报警等功能。机器人控制柜、机器人示教器、PLC 控制柜均设有急停开关,在紧急情况下按下急停按钮可实现系统急停同时发出报警信号。同时需要配置一台 PC 机进行离线编程并可监控整个加工过程。
2.9 离线编程软件
系统介绍离线编程将工业加工过程所需要的三维信息通过 CAD 模型、三维测量仪器输入到交互式机器人系统软件。根据输入信息该模块自动产生机器人运动轨迹和程序。并针对不同的加工过程设置相应的加工过程参数,对生产过程进行控制。与常用的手工在线逐点机器人编程法相比较,该模块的使用将大大缩短编程时间。采用离线编程避免了生产过程的中断,提高了设备使用率。
图 11 所示为在该平台进行的机器人系统仿真图。图 12 显示了为工件规划的磨
系统特点
—— 离线编程系统具有强大的兼容性,可输入多种不同类型的三维信息,包括 CAD 模型、三维扫描仪扫描数据、便携式 CMM 数据、以及 CNC 路径等
—— 多种机器人路径生成方式相结合:用鼠标在三维模型上选点;自动在曲面上产生 UV 曲线、边缘曲线、特征曲线等;曲面与曲面的相交线;曲线的分割、整合等;机器人路径的批量产生等
—— 通过加工过程参数,在机器人加工路径的基础上,可自动生成完整的机器人加工程序。生成的程序可直接应用到实际机器人上,进行生产加工削轨迹。
系统效益
※降低新系统应用的风险:在采用新的机器人系统前,可以通过离线编程平台进行新系统的测试,从而避免应用上的风险,同时降低新系统的测试成本。
※缩短机器人系统编程时间:尤其是对于复杂曲面形状的工件来说,采用离线编程软件可显著缩短产生机器人运动路径的时间无需手工编写机器人程序:通过各种控制模型,在离线编程软件中可以自动生成完整的可用于实际机器人上的机器人程序。
※缩短新产品投产的时间
※通过离线编程,减少了占用实际生产系统的时间,增加生产效益
※虚拟仿真技术的应用提高了机器人系统的安全性
2.10 在线校准软件
系统标定在机器人离线编程平台中占有举足轻重的地位,如果没有标定技术,机器人仅仅利用离线编程得到的磨削抛光程序不可能得到高质量的工件。标定主要分为以下各个部分:
※砂带机、抛光机的标定
※工件的标定

好的文章,需要您的鼓励
20

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2020-07-23 09:54:06
- 2023-06-29 16:00:00
- 2021-06-09 13:56:09
- 2019-01-18 14:44:36
- 2017-06-14 09:53:48
- 2018-08-17 10:19:28
- 2018-12-27 11:25:11
- 2018-11-15 13:10:05
- 2021-08-01 12:05:23
- 2018-07-10 10:50:18
- 2021-08-01 17:30:40
- 2018-07-02 18:50:30
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









