





遨博机器人报错代码:调用子工程命令(Procedure)和移动命令( move )

11.4.1 调用子工程命令(Procedure)
Procedure 是子工程(过程)编辑命令。在 Procedure 程序段里,可以编辑用于复用的程序段,很方便的加载到其它的项目程序段中。工程文件和子工程文件中均可以调用子工程命令。
➢ 在工具栏工程或者过程下点击新建,工程逻辑处显示 New Project 或 NewProcedure。
➢ 在程序列表中选中需要插入子工程命令的逻辑行,在工具栏点击条件下的高级条件,在属性窗口处点击 Procedure。
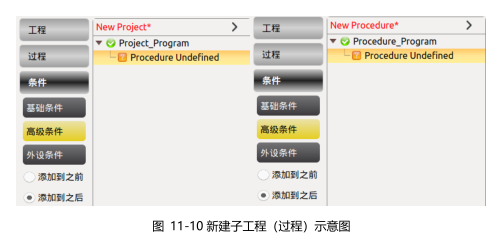
➢ 在程序列表处点击 Project_Program 或者 Procedure_Program 可以更改其名称
图 11-11 更改程序列表中子工程(过程)名称
➢ 注意:Procedure 过程程序段中不能插入 Thread 程序。
➢ 选中工程列表处的 Procedure Undefined,在属性窗口会显示可供调用的子工程文件。
➢ 选中子工程文件,点击确认即调用了该子工程文件,此时,被调用的子工程文件中的命令显示在工程列表处。

➢ 点击刷新为文件更新按钮,检索当前文件保存目录,更新显示文件变动。
11.5 移动命令( move )
Move(移动)命令用于机器人末端工具中心点在路点间的移动操作。通过基本路点(waypoint)控制机器人的运行,路点(waypoint)必须置于运动命令下。
➢ 在程序列表里新增一个 Move 节点,下面含有一个 Waypoint 节点。
➢ 点击昵称右侧输入框可修改命令名称。
➢ 选中 Move 节点,可以对 Move 命令进行状态配置。
➢ 机械臂运动属性有三种选择:轴动运动、直线运动和轨迹运动。将在之后小结进行详细介绍。
➢ 点击翻转可以倒序复制 Move 节点下的所有 Waypoint 路点。
➢ 点击移除可删除此 Move 命令。
➢ 必须点击确认,确认配置完成,并保存。
➢ 直线运动以及轨迹运动中的 arc 和 Movep 运动模式属于笛卡尔空间轨迹规划,
需要做逆运动学求解。因而可能存在无解、多解、逼近解的情况;而且由于关节空间和笛卡尔空间的非线性关系,可能会出现轴动运动超出其最大速度和加速度限制的情况。

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-11-06 21:02:05
- 2022-11-08 15:34:38
- 2022-11-07 11:03:24
- 2022-11-06 17:03:18
- 2022-11-06 11:04:05
- 2022-08-03 10:20:40
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06









