





【集萃智造】研创营业中 | 这个让机器人启动更稳定可靠的小优化,你可pick?
时间:2021-01-29
阅读:7188

在这机器人“与人共融”的快速发展期
想要提高协作机器人的性价比
让国内有需求的中小企业
都能快速用上机器人
集萃智造认为
主要可以从核心零件的自主研发着手
电机是协作机器人作业的原动力。在当前很多客户的实际应用中,协作机器人需要低速运行,比如实验室里的药物检测、焊接、服务场景的咖啡机器人等,这就对机器人控制的稳定性和精度有了更高要求。
目前,国内市场上的常见电机在低速运行时,控制稳定性和精度往往较差。所以针对电机零速启动时转子位置角定位难、输出力矩小等问题,集萃智造研发团队近期优化了具备霍尔位置传感器的无刷直流电机矢量控制启动策略,增强了协作机器人在负载较大场合下的启动能力,让电机启动更可靠。

霍尔位置估算原理
01、基于霍尔位置传感器的转速和转子位置估算方法,是建立在电机稳定运行且能够准确获取转速、位置等信息基础上的。通常情况下,将3个霍尔原件安装在空间相隔120°的圆周上,相对于每一相定子绕组超前30°或90°电角度。
以1对极电机为例:
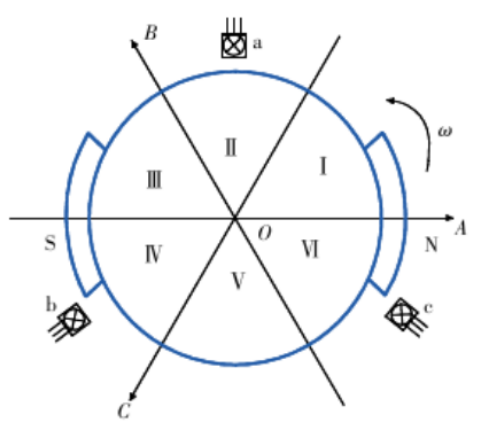
霍尔传感器超前90°安装的位置
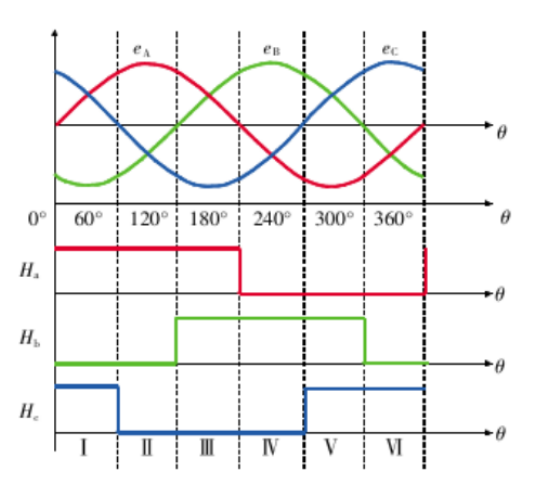
三相霍尔信号与反电势对应关系
电机启动时,根据霍尔位置传感器输出信号得到启动初始角位置,即转子所在当前霍尔扇区的中间位置,角度误差控制在±30°以内,然后根据给定转速与电流信息,执行SVPWM算法。电机转动后带动转子同轴上的光栅编码器,在事先完成光编Z信号绝对电角度标定的前提下,光栅旋转输出Z信号脉冲时完成电角度补偿,实现电机高效率、低转矩脉动运行,从而提高了机器人的运行稳定性及启动能力。
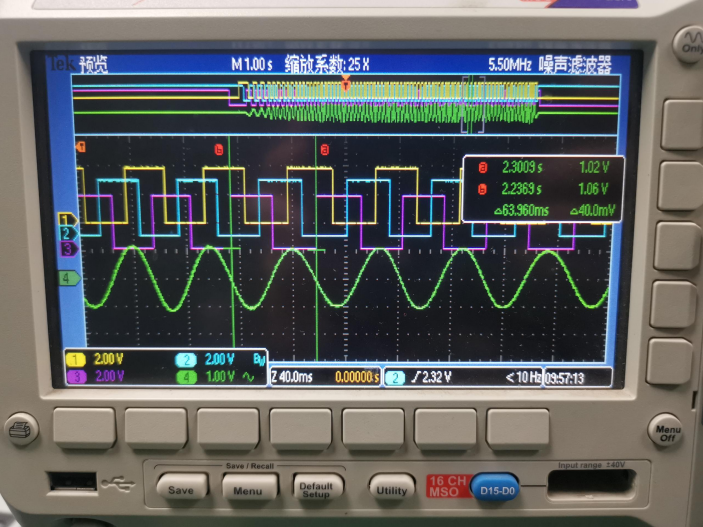
实测图
集萃智造
协作机器人
零部件

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
复合机器人:引领液态金属镓罐装与包装自动化的技术创新
关键字: 2024-07-02 -
损害员工健康和生产效率的研磨操作,你可能正在经历!
关键字: 3m 2024-07-02 -
智光眼(工业3D相机)
关键字: 伟景 2024-07-02 -
轴向力控浮动打磨工具:多曲面加工的高效之选
关键字: 2024-07-01 -
行业化适配!仓储管理的“最强大脑”还得是iWMS
关键字: 海康机器人 2024-07-01
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03

推荐
江苏集萃智能制造技术研究所有限公司
 5年
5年

产品推荐
-

IIMT-CR-03-轻型协作机器人
负载:3KG
工作区域:600mm
-

IIMT-CR-05-轻型协作机器人
负载:5KG
工作区域:900mm
相关资讯
相关问答
- 2020-10-22 10:41:37
- 2018-08-09 10:49:14
- 2018-11-12 08:52:28
- 2022-08-10 16:13:02
- 2018-11-22 08:52:08
- 2020-10-22 14:23:49
- 2022-08-25 10:09:10
- 2022-09-12 18:10:44
- 2023-01-27 11:43:58
- 2018-12-26 09:20:57
- 2023-01-28 20:21:04
- 2022-11-08 21:58:02
栏目推荐
- 2024-07-01
- 2024-07-01
- 2024-07-01
- 2024-07-01
- 2024-06-28
- 2024-06-28
- 2024-06-28
- 2024-06-28
- 2024-06-28
- 2024-06-28









