





机器人的新标准

Aaron Dollar办公室的墙上贴着R.U.R.(Rossum的通用机器人)的海报。1920年的捷克戏剧创造了“机器人”这个词。戏剧的最后机器人控制了生产它们的工厂,然后消灭掉了所有的人类。幸运的是,Dollar对人类和机器人的关系持有乐观态度。
Dollar将机器人视为我们日常生活中的帮手,比方说帮忙布置餐桌或者帮忙安装新书柜。但是,在机器人能在家庭的非结构化环境(相对于工业环境)工作之前,还需要重大的技术飞跃和全球机器人主义者的努力和协调。起居室被称为机器人的最新前沿,但首先,机器人领域需要设立一些能让每个人都同意的标准。
一个包含77种工具的手提箱大小的箱子,它里面有锤子、无绳电钻、垃圾桶和九孔桩测试的东西。它们可能看起来很普通,但这些精心策划的家庭用品可能是一种新机器人标准化的未来。这被称为Yale-CMU-Berkeley(YCB)对象和模型集,旨在专门为世界各地的机器人操作和假肢实验室提供通用基准。
Dollar是机械工程和材料科学的副教授,大约两年前就有了这个想法。他希望给机器人研究中的操作任务带来一定程度的特异性和普遍性。例如,现在的研究论文可能将特定的任务描述为“机器人手抓握锤子”。那么到底是一把大锤子还是小锤子呢?我们并不知道,所以如果你在一个机器人实验室工作,并且重复这个研究实验的话,这会是一个问题。如果使用YCB集,每个人都会在YCB要求的标准情况下进行实验,比如使用23.45盎司的斯坦利锤子。
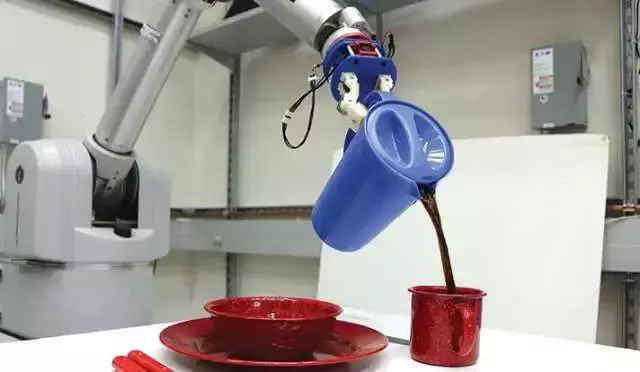
除了对象之外,项目还提供了五个操作任务的示例(例如将水从壶里倒进杯子,或者布置餐桌)和每个示例的基准。该项目的网站还允许其他实验室通过提供自己的协议和基准来扩展这些任务。Dollar表示,当实验室单独通过自己的标准和协议工作时,通常对实验室的特殊优势存在无意识的偏见。通用标准将提供一种更公正的方法来评估结果。
机器人目前在结构化环境(例如出厂设置)中表现良好,它们执行和重复数量非常有限的任务。“在结构化的环境中,机器人在完全相同的地方看到完全相同的对象,”Dollar说,“让机器人在这些环境中操作是一个相对直接的事情,因为你只需要编程让它做一件事。”
但是,Dollar和其他机器人主义者有更具挑战性的创作想法。

上图:机器人抓住电钻。
图片来源:耶鲁大学
他说:“现在机器人领域正在研究可以在日常环境和家庭中工作的机器人,这是装配线的另一体现。”
长期以来,标准一直是科学进步的关键部分。直到19世纪,个别地方的时间由市政时钟管理。今天,由于全球统一了时间标准(和日益准确的原子钟),我们有了个人GPS系统和无人驾驶汽车。几个世纪以来,人们用他们的手和脚来测量东西的长度和高度。但后来世界标准化了测量单位,国际重量和测量委员会在巴黎的气候控制库中存储了金属棒,每个金属棒都作为特定测量单位的标准承载体。在最近几年,这些金属物体已经被基于光速(其中涉及原子钟和时间的标准化)的更精确的标准所替换。
在某种意义上,77项框是与巴黎金库或原子钟相当的机器人技术。如果实验室更好地沟通,以更快的速度推进领域,可能会引领一个新时代。这是关键的一步,因为让机器人从装配线走入日常生活很有难度。Dollar专注研究机器人操作或抓握。作为人类,我们经常理所当然地把复杂的东西看得很简单,比方说拿起一个叉子并使用它。为了制作能执行很多任务的机器人,并且每个实验室不能再根据自己的测量标准进行操作,所以他们需要一个通用标准。
这就是77项框发挥作用的地方。机器人实验室能够找到自己的对象来操作是很容易的。但是为了推进研究,该实验室的工作结果必须能够与其他实验室进行比较。
他说,“当我们有新的组件或手的想法并进行测试,以便研究它的工作原理时,通过量化评估我们可以看到,与其他想法相比该想法的情况如何。但是Dollar表示他们没有获取YCB集演示的高级功能。
机器人专家表示,这样的标准在最近将有很多用处。该领域的研究一直不够复杂,直到最近几年才从这种标准化中受益。然而,现在的情况又有所不同,因为集成系统需要多学科联用来创造出能够做一些收拾碗筷这类事情的机器人。
哈佛大学工程学院雅培和詹姆斯·劳伦斯教授Robert Howe说:“机器人从实验室逐步应用到现实世界,人们很难理解它们的能力和局限性。在工厂里,一切都是设置好的,你可以严格测试它们的工作,但在厨房里可能有20种咖啡杯,所以如何表征和比较机器人存在很大困难。Aaron的方法就很有前途。”

上图:锅和铲是家庭常用之一,需要由专门从事机器人操作的实验室提供通用基准。它们的不同形状和大小能涵盖大部分机器人的能力。
图片来源:耶鲁大学
Howe指出,即使是看似简单的抓取任务也需要非常先进的工程。不仅需要精心设计手和手臂,操作者还必须仔细控制,然后必须将所有这些协调的元素包装到一个单一的系统中保证机器人要足够快和准确。他的实验室在研究触觉感测,研究可能会需要计算机视觉专家的加入。
Howe说:“这就是为什么说YCB集很有必要。”现在,实验室可以对机器人在某项任务上做得好坏进行评分,实验室之间可以进行PK。
在Dollar有了标准化设置的想法之后,他在机器人领域的两个前同事也加入了研究,分别是来自卡内基梅隆大学的Siddhartha Srinivasa博士和加州大学伯克利分校的Pieter Abbeel博士。他指定Berk Calli在他的实验室担任博士后,并负责该项目。2014年来到耶鲁的Calli表示,机器人技术缺乏重现性是该领域研究人员长期以来认可的问题。他表示,一篇文章只比较了其他实验室的两个算法,这是非常罕见的。
Calli说:“如果你可以用协议来比较他们的算法,这会是巨大的进步。在机器人的量化和比较方面,还从来没有这么做过。”
Calli表示,该领域只能接受标准化。“有一个算法池,没有人知道哪个算法性能最好,如果不知道哪种算法有用,我们就无法继续完成接下来的工作。”
理想情况下,YCB集提供对象和示例任务只是一个开始。在YCB对象和模型集网站上,研究团队还为其他实验室提供了一个框架,以便于其他实验室提供自己的操纵测试和基准。在那里,研究人员可以看到其他实验室的协议,并可以在论坛中进行讨论。
Dollar说:“最主要的是让其他研究人员提出自己的协议,然后让人们利用这些协议。”

上图:玩具飞机是机器人编程组装的对象之一。
图片来源:耶鲁大学
为了选择正确的对象,研究人员梳理了许多机器人的论文,以了解操作测试中最常用的是什么类型的项目。他们也去商店寻找更多的想法。
应该优先选择耐用并且现在流通而未来也不会有很大改变的物体。还应选择标准消费对象以降低成本。
对象分为几类。例如,食品组包括谷物盒、Pringles芯片圆筒和垃圾桶。工具的范围应该从小钉子到木块和一个无绳的钻子。Dollar表示他的目标是能抓起各种尺寸的物品。一些物品具有相对容易抓握的简单几何形状,而其他物体的复杂形状对机器人手来说是更大的挑战。
这些项目还包括各种基于任务的对象:“盒–块测试”,即木制立方体放置在盒子中;可组装和拆卸的玩具飞机;各种乐高积木建筑结构件。该套件还配有一个数字计时器,用于测量某些任务的执行速度。
找到YCB集的所有正确的部分后,为了项目顺利进行,Dollar还需要说服其他实验室采用YCB集。他和他的同事一直忙于在国际机器人会议上宣传这些集。YCB集在2015年5月的IEEE国际机器人和自动化会议(ICRA)上首次亮相。Dollar表示,大家的反应“非常积极”,他们收到了约为50个集的请求,研究人员还可以订购套件并将其运回实验室。目前世界上约有100个机器人实验室有YCB套件。
Dollar说:“我们希望尽可能多的人使用YCB集,因为这是让YCB集发展的唯一的方式。”
南佛罗里达大学计算机科学与工程系副教授Yu Sun表示,他的实验室是“幸运儿”之一。今年10月在韩国,他在智能机器人和系统国际会议举办的比赛中用到了YCB集。他自己的实验室已经使用对象生成了一些操作数据。
Yu Sun说:“使用Aaron Dollar对象集的好处是其他人也能够使用我们的数据集,因为他们有相同的对象,他们可以应用到他们自己的算法中。如果机器人所处的物理环境条件不同,其他机器人的数据集就无法直接应用。”

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
2025两会热议:工业机器人“黄金五年”已来?
关键字: 工业机器人 2025-03-12 -
AI赋能工业机器人,制造业革命,已悄然来临!
关键字: 工业机器人 2025-01-16 -
巅峰对决完美收官!2024年中关村仿生机器人大赛各项冠军出炉!
关键字: 仿生机器人 2024-11-29 -
出海+ | 极智嘉10月全球新动态
关键字: 极智嘉 2024-10-24 -
会议邀请 | 昇视唯盛邀请您参加第8届国际机器人焊接、智能化与自动化会议暨第15届中国机器人焊接会议
关键字: 昇视唯盛 机器人焊接 会议 2024-10-17
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-05-14 13:36:48
- 2019-09-27 11:29:38
- 2022-06-27 10:05:41
- 2020-08-17 15:11:43
- 2019-01-25 11:08:57
- 2020-10-16 13:27:55
- 2022-08-24 12:09:31
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2025-03-12
- 2025-01-16
- 2024-11-29
- 2024-10-24
- 2024-10-17
- 2024-10-16
- 2024-10-16
- 2024-10-16
- 2024-10-15
- 2024-10-15









