





ABB机器人常见报警代码与解决方案

当ABB机器人向示教器发送报警代码时,它也会指示原因和解决方案,因为具有丰富机器人工作经验的ABB员工可以快速获得有效信息并解决问题。然而,对于普通人来说,ABB对机器人操作员的建议过于笼统,无法获得有效信息,更不用说逐步列出解决方案。ABB机器人常见报警代码与解决方案?
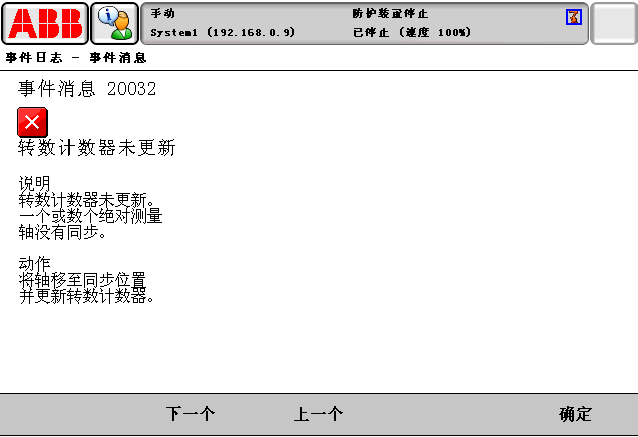
1.报警代码:20032(速度计数器未更新)
报警原因:ABB机器人有一个独立的电池供电旋转计数器,用于记录每个轴的数据。如果显示,如果显示。ABB学习辅助设备表明电池电量过低,或者当电源关闭时,ABB机器人的手会移动。此时,需要更新旋转日历或机器人的工作位置不准确。
20032解决方案:
①手动停止机械原点的每个ABB机器人轴,即对齐各轴上的刻度线和相应槽;
②在主菜单中,单击“校准”->单击“更新转速计数器”;
①单击每个轴以更新旋转充电器(无需更新启用示教器);
报警代码20032计数器未更新
2.报警代码:38103SMB通信中断)
解决方案38103:检查机器人控制柜下的SMB电缆是否正确连接。
报警代码38103和SMB之间的通信中断
3.报警代码:50057(连接不同步)
报警原因:大多数故障是由停机故障引起的。
50057溶液:1。单击“重启”,选择“高级”,选择B启动,机器人将返回到其最后的正常状态。(正确的关机模式不是直接关机,而是访问。ABB,单击“重启”,然后选择“高级”,然后再选择“关机”)
50057成员不同步
4.报警代码:50204(运动监测)或50056(联合冲击)
报警原因:ABB机器人碰撞或发动机制动器未打开。
50204/50056解决方案:在发生碰撞时,可以暂时关闭碰撞监控,并缓慢关闭ABB机器人;
在没有碰撞的情况下,检查接触板附近的K42.K43.K44制动控制线是否连接。
(关闭碰撞跟踪的步骤:单击控制面板中的“监控”,然后选择关闭手动操作跟踪。
50204活动监控代码
5.报警代码:50296(SMB内存数据差)
报警原因:由于SMB或控制器卡更换,SMB内存与控制器数据冲突。
50296解决方案:
1.从主菜单界面选择要校准的机械单元,然后单击“SMB内存”;
2.选择高级;
3.根据原因选择“清除控制柜内存”或“清除SMB内存”;
4.按回“关闭”并单击“更新…”;
5.再次更新速度计数器。
ABB报警代码50296SMB内存数据差异
7.报警代码:34316(电机断电)
报警原因:相应电机控制的电源线未正确连接。
34316解决方案:根据示教器撑杆,用错误的电源线连接固定轴,然后调整电源线连接。
(A41为驱动,X11为1轴输出,X12为2轴输出等)
ABB报警代码34316发动机电源故障
8.报警代码:10106(维护时间提醒)
报警原因:ABB机器人的智能定期维护提醒邀请用户对机器人进行必要的维护和维修。
10106解决步骤:在完成各自的维护和维修后,应按照以下步骤进行操作、重置维护和维护:
①单击并按住“程序编辑器”菜单->调试->调用例程
②单击“服务信息”->转到;
①按下启用开关,然后按下操作按钮;
①选择适当的重置计时对象。1是定期维护时间,2是工作时间,3是变速箱维护时间。选择1。
⑤单击“退出”退出->单击“是”;
ABB报警代码10106服务时间提醒
报警10107.10108.10109.10110.10111.10112也与ABB和机器人维护有关,解决阶段与10106相似。
9.报警代码:39504(制动力过载)
39504解决方案:驱动器:制动电源、电源线、控制模块、外壳电缆,检查编码器电缆,找出损坏的零件并更换。

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2019-03-25 10:28:49
- 2020-12-28 17:28:00
- 2019-10-24 14:07:21
- 2018-03-29 14:21:15
- 2021-07-14 10:12:06
- 2023-09-19 21:10:19
- 2023-02-15 09:57:31
- 2022-09-21 10:03:03
- 2022-08-01 15:56:43
- 2022-11-01 07:12:03
- 2022-11-02 14:57:13
- 2022-08-03 14:08:08
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









