





SCARA机器人的硬件系统设计 中

MCU控制模块
SCARA机器人MCU是整个控制模块的核心,需要实现对电机的转速检测和运行控制、与PC机通讯、显示和存储等功能。外围资源一共需要66路I/O, 5路PWM和1组串行口。其中39路I/O用于SDRAM存储,进行相应数据传输和信号控制;17路I/O用于液晶显示,作用于并口数据传输,片选等相关控制以及对字库的操作;10路I/O用于测量电机转速和转向,每个编码器分别由2路I/O配合判断电机的转动情况。另外需要5路I/O用于模拟PWM占空比。在满足设计需要的前提下尽量提高利用率,需要低功耗、主频高的控制器。FPGA控制器满足以上要求,充分满足本硬件系统的优点。运动控制器主要包括FPGA模块、数字量输入输出接口模块以及FPGA的外围电路模块。
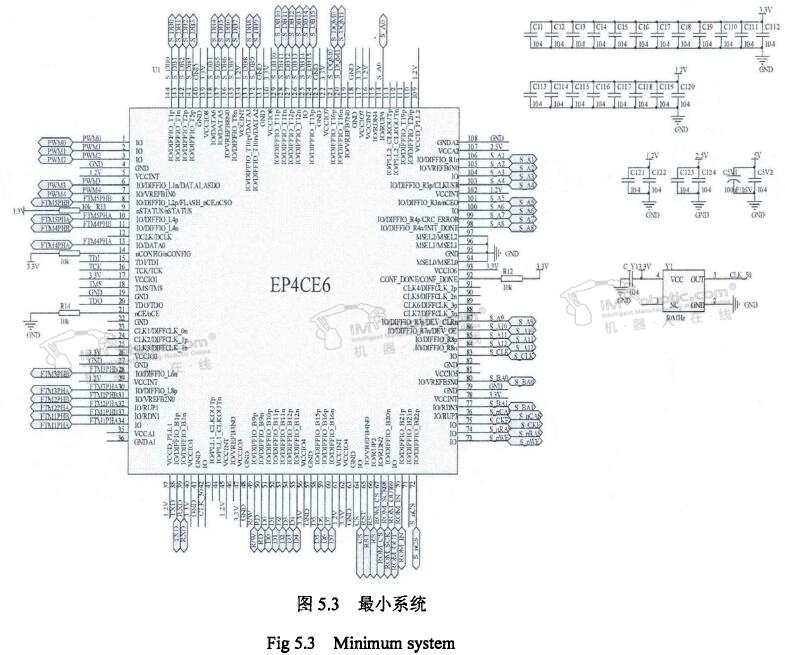
最小系统使用外部有源晶振SOMHz,3.3V供电。对于系统用到的每一路进电都采用滤波处理,目的在于降低电源波动。另外对于输入输出的信号都采用滤波处理,目的在于减少甚至消除噪声干扰。其工作原理如图5.3所示。
主控制器选用Altera公司生产的EP4CE6F17C8型号FPGA控制器,属于Cyclone 1 V系列FPGA器件。以下是器件标号说明。EP4CE表示器件族,为Cyclone系列。6表示芯片在当前系列的编号。F表示封装类型,为FineLineBGA封装。C表示温度级,是Commercial range(商业级)。8表示速度级,在Cyclone中分6,7, 8三种速度级别,6为最快,8为最慢。
Cyclone系列FPGA是在全铜工艺、基于成本优化的1.5V的SRAM工艺,相对于普通FPGA在保持强大性能的前提下,成本降到一半。另外它还集成了很多功能,包括板机的时钟网络管理、功能完善的锁相环功能以及专用的I/O接口。
由于SRAM工艺容易丢失的特性,FPGA每次上电后都要再次配置,这是基于SRAM的FPGA的与众不同之处。这也大大降低了开发的便利性,是它的一个缺点。要想解决这个问题,使用主动串行AS的配置方式是一种良好的方法。即每次上电时,有专门的芯片加载程序,代替人工加载。
串口通讯模块
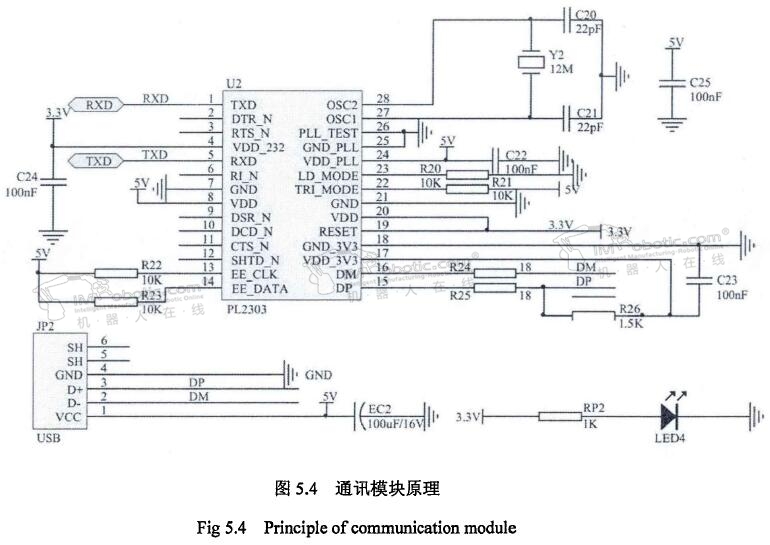
硬件系统的通讯部分主要实现与PC机的通讯。将FPGA采集到的SCARA机器人各机械结构转速等参数利用通讯传输到PC上,PC机下传给FPGA相应的指令与数据。EP4CE6集成了多个UART,本设计只使用到UARTO。控制主板移植并调试了Linux系统。本设计使用了常用的PL2303芯片,利用USB接口与PC机连接。PL2303是Prolific公司生产的RS232-USB接口转换芯片,是实现RS232全双工异步串行通讯与USB功能接口便利连接的理想方案。RS232-USB接口转换芯片可以3.3V或者SV供电,其原理如图5.4所示。
检测模块
光电编码器式传感器主要由旋转孔盘和光电器件组成。它的输出是与孔盘转角或转角增量成正比例关系的脉冲信号,通过对脉冲信号计数,即可测定孔盘转过的角度。光电编码器式传感器又分为绝对式和增量式,前者转角范围小于360°,用于低速端角位置测量;后者无转角范围限制,可用于高速端角位置测量或转速测量。光电编码器式传感器的主要特点是测量精度高;输出量为脉冲信号,抗干扰能力强;可以同时用于位置和速度的测量,使用方便;但高精度的光电编码器价格比较贵,成本高。因此我们采用光电编码器对SCARA机器人各机械结构的转速参数进行检测。由于SCARA机器人各机械结构要完成规定动作,因此需要五个电机对其进行驱动。本硬件系统主控制板留有五个光电编码器接口,其原理如图5.5所示。
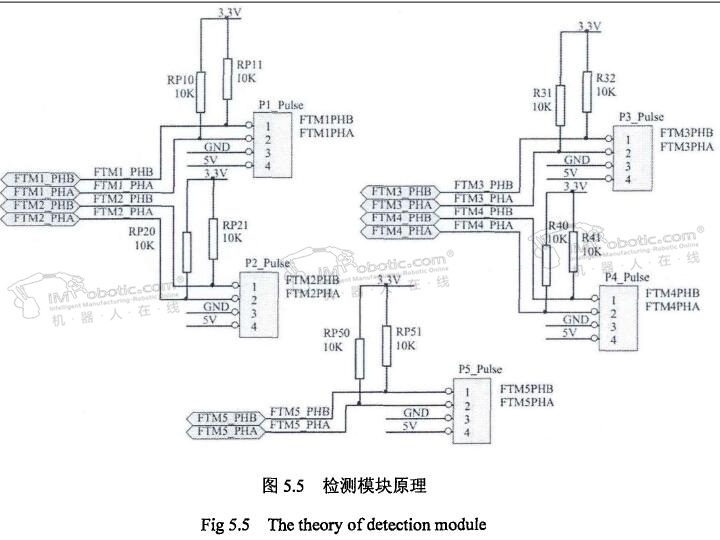

光电编码器使用日本欧姆龙公司的E6A2-C型号,为增量型双相输出,分辨率为500线,可以判断电机转速和转向。由于该器件为开漏器件,每处接口都使用上拉电阻,器件实物图如图5.6所示。

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2023-04-12 18:24:02
- 2023-05-02 21:14:05
- 2023-05-08 17:22:00
- 2022-12-01 14:01:36
- 2023-02-02 10:09:54
- 2022-08-03 10:20:40
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









