





SCARA机器人的硬件系统设计 下

SCARA机器人控制模块
考虑到稳定性和精度问题,本设计使用电机驱动模块配合电机控制。一共为五个驱动模块,分别对应控制五个电机,FPGA通过对PWM波的占空比和频率的控制进而实现对电机的驱动电流和电机转速的控制。本硬件系统利用I/O模拟PWM达到控制效果。
PWM控制技术的理论基础来源于采样控制理论中的面积等效原理。即冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其基本效果相同。PWM控制方式具有提高器件工作效率,减小导通损耗的优势,使得该技术几乎取代线性功率放大电路。PWM技术主要通过改变器件驱动脉冲信号的开关时间,从而改变负载两端平均电压的数值。PWM控制实现了模拟控制的数字化,使得效果灵活而且比较简单。PWM控制技术通过对器件的开关进行控制,使得输出脉冲幅值相等而宽度不等,脉冲替代了正弦波。通过调制可以改变输出电压的大小,也可以改变输出频率。
利用PWM控制来对于电机的控制在早期采用模拟技术实现。随着数字控制技术的发展,利用数字调制脉宽已经得到广泛的应用。PWM信号的提取在FPGA控制器的内部经过复杂的计算,通过对规则采样相关的数学方程式的计算获得的。
本系统设计需使用5个永磁式同步步进电机,分别是北京飞凌东泰电子技术有限公司生产的FY86BYG92,FY86BYG62,FY42BYG48,FY57BYG100和FY57BYG41型号步进电机。相比于其他类型的电机,它的优势更加凸显。结构简单,工作时间长寿命久,稳定安全可靠,效率高,转速与频率严格成正比,过载能力相对较大,转动惯量相对较小,所以永磁同步步进电机应用十分广泛。
考虑到自行设计的电机驱动电路不稳定,在实验阶段使用了电机驱动模块,均为PWM控制原理,分别配合5个电机进行工作。FY86BYG92,FY86BYG62,FY57BYG100和FY57BYG41电机为永磁同步电动机,属于交流电动机,采用3H090MS三相步进驱动器进行驱动。该驱动模块利用交流伺服原理,双极性恒流细分驱动,最大细分至10000步/转,有16档细分模式可以选择。最大输出驱动电流每相5.2A,具备过压、过流、短路和温度保护等功能,在安全性能方面比较可靠。另外利用拨码开关可以直接设置细分和电流值,操作方便。其中,对于FY42BYG48型号电机采用深圳嘉文电子科技的THB6128型号步进电机驱动器进行控制。该模块的额定电流为1.8A,最大输出电流为2A,在0.3}1.8A区间可以无级调节,任意设置。该驱动模块默认为混合衰减,对于环境的适应能力较强。另外,它的接口采用高速光祸进行有效隔离,可以1/2/4/8/16/64/128总共八档细分模式可以选择,对于模式的选取和设置可以利用驱动板上的拨码开关实现。可以过压、过流、过热和短路保护,具有较强的抗高频干扰能力。
存储模块
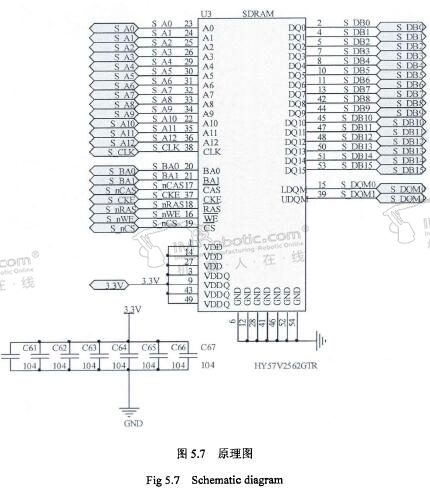
嵌入式系统当中,Nor flash, Nand flash和SDRAM接口是3种经常使用的存储器接口。他们各自有优缺点,其中Nor flash可以存储引导程序,存储在其内部的程序可以直接执行,具有掉电保护的功能。而Nand flash也可以存储引导程序,存储在其中的程序需要复制到RAM中才能正常执行,另外也具有掉电保护功能。而SDRAM容量大、运行速度最快、但是成本不高。它不仅可以存储执行中的程序也可以存储产生的数据,执行速度相对于Nor flash而言比较慢。
SCARA机器人各机械结构在运行过程需要处理大量数据,需要片外存储。另外考虑到硬件结构及器件的精简,本设计没有使用ROM存储器和RAM存储器。但SDRAM可以成为系统运行过程中重要的操作存取存储器,这类器件有一定数据堆栈空间和程序运行空间。本系统使用韩国海力士公司生产的HY57V2562GTR型号存储芯片。遵循标准的SDRAM协议,内部实现堆栈操作,存储空间可达256Mbit,每64ms可以刷新 8192次,不管是在运行速率还是实际内存方面都满足设计需要。其原理如图5.7所示。
显示模块
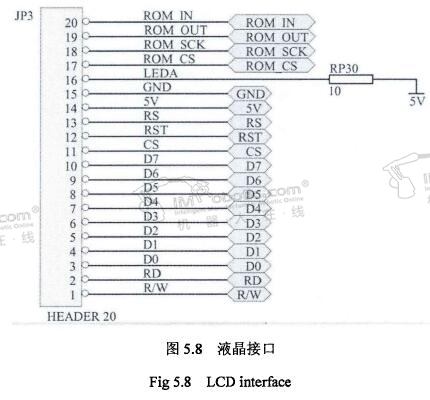
实际运行过程中为了更好的反应系统工作状态,加入了液晶显示部分。硬件控制主板指留有液晶接口,外接液晶驱动板。前期的硬件调试主要以带字库,并口数据传输的黑白液晶,是成熟的液晶显示模块,只需根据液晶实际的引脚定义与控制器相应功能的引脚相连就可以。后期将考虑转换至触摸屏,彩色显示的TFT液晶模块,系统使用深圳晶联讯公司生产的几X240160G-666-PC型号液晶屏。该液晶屏可以显示240列x160行点阵单色或4灰度级的图片,显示区域面积比较大,自带标准汉字和字符库,符合设计需要。主控板中留有液晶接口,其引脚定义如图5.8所示。
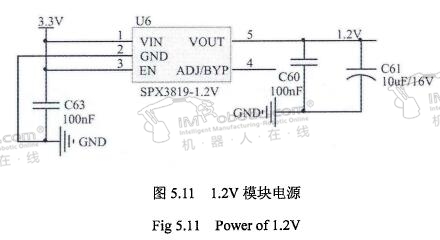
电源模块
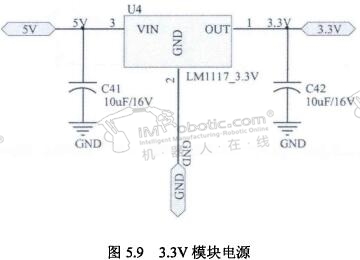
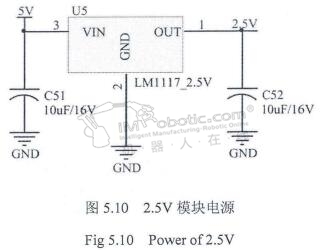
整个硬件系统需要多种电平供电,FPGA控制内核为1.2V供电,主控制器的I/O口电平为3.3 V,其他外设主要是5V供电驱动,整个系统的电源部分为多电源系统。控制板的主进电为5V直流供电,PCB板子上有相应的电源转化模块。本设计采用AMS1117_3.3V将5V转化为3.3V,用AMS1117_2.5V将5V转化为2.5V。用SPX3819_1.2V将3.3 V转化为1.2V。具体如图5.95.11所示。
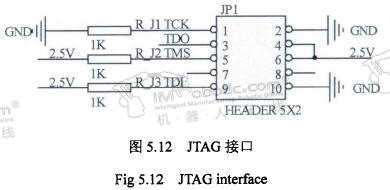
JTAG接口
EP4CE6型号的FPGA控制器内置标准的JTAG接口,可以进行在线仿真测试,并且具备Embedded ICE调试模块。利用JTAG接口可以对外置的存储器进行编程操作。其原理图如图5.12所示。

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2023-04-12 18:24:02
- 2023-05-02 21:14:05
- 2023-05-08 17:22:00
- 2022-12-01 14:01:36
- 2023-02-02 10:09:54
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









