





焊接机器人视觉传感器光心距离计算
时间:2017-06-14
阅读:8529
原创

焊接机器人视觉传感器光心距离计算
当确定完镜头和激光器的选型结束之后,还需对其空间位置分布做确定。
现对视觉系统在Z方向上的理论分辨率进行验证,来判断该镜头是否可以用于该工况之下,如式(2-3)所示:

上式中b为两相机的光心距离,f为焦距,z为物距,![]() 为像素精度,z为物距,一般像素精度为像元宽度的0.02倍,这里
为像素精度,z为物距,一般像素精度为像元宽度的0.02倍,这里![]() 为0.35
为0.35![]() 。
。
下图2-10为伴随着光心距离改变的相机分辨率变化曲线,这里分别取z为200mm,250mm, 300mm, f为之前计算分析选择的8mm,则利用MATLAB对于公式(2.3)进行仿真,得到三种工作距离下双目相机针对不同的光心距离相机分辨率的变化规律。
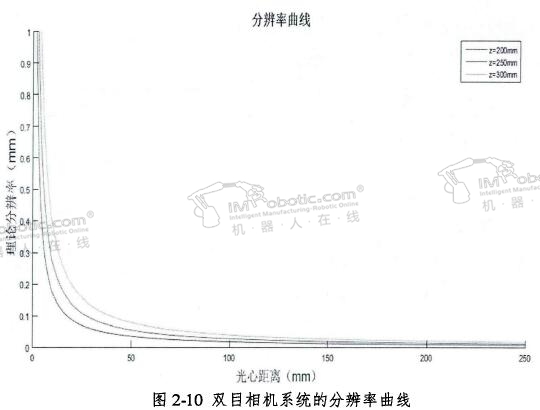
焊接机器人上述曲线表明在三个典型工作距离内,两相机之间的光心距离与理论分辨率的关系。由图中可知,当光心距离大于150mm之后,三个典型距离的理论分辨率趋向一致,且都位于0.02mm左右,符合工作要求,所以在设计传感器中相机的分布结构应该考虑将两相机光心距离定位大于150,但又由于相机视野范围的原因,两相机之间的分布距离也不应太大,导致两相机的视野范围重合度过低。所以初步定两相机光心距离为150mm。
焊接机器人
基于双目视觉的机器人焊缝轨迹检测的研究
技术干货

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









