





喷涂机器人轨迹点构成轨迹的规划控制(下)

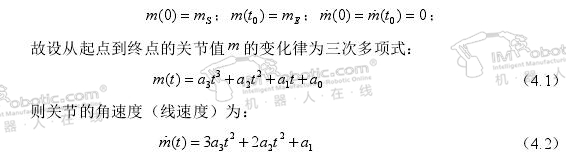
由上述讨论可知若要m不发生冲击则m的变化律必须是二次以上的高次多项式函数。
自然地,我们想到了利用多项式拟合来描述m的时变特性。问题是用几次多项式拟合比较合适。如若次数过高,则会增加运算开销,影响了喷涂机器人关节离线控制的实时性。同时,常用的喷涂机器人约束条件也比较有限,不足以解出所有多项式的待定参数。通常在机器人运动中会存在一些明显的约束关系,即:
根据约束关系我们可以列写方程解出多项式系数:

所以当讨论两点间的轨迹运动,关节起点位置A和终点位置B的瞬时速度为零时,其关节运动的三次多项式为:
.jpg)
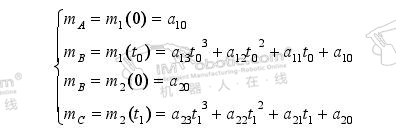
基于上述讨论,当讨论三个轨迹点时可以将其看作是两段两个轨迹点三次多项式的组合。为了机器人在进行连续的轨迹运动时运动尽可能的平滑,需要在过度轨迹点B处的速度和加速度连续。如图4.7。
.jpg)
设从a点到B点的关节变量变化律为![]() ,从B点到c点的关节变化律为
,从B点到c点的关节变化律为![]() ,由4.1式结论有:
,由4.1式结论有:
.jpg)
类似的,记三点处关节变量值为![]() ,则静态约束关系有:
,则静态约束关系有:
当在轨迹上运动时,又会存在关节速度和加速度的约束关系。
显然在起点A处和终点C处的瞬时速度为零,有:
.jpg)
另一方面,在中间点B处的关节加速度和速度应该连续,有:

出于简化运动控制参数运算角度考虑,我们在将一段完整轨迹分割为若干两点轨迹分析时,安装法兰盘的中采用等时分割。通常情况下,机器人工作时末端(即第六轴工具心)运动速度可以通过程序给定。这就意味着在每个分割时段内机器人运动的轨迹长度是可知的。假设等时分割的采样时间为l,即![]() 。由上述约束关系可以方便的解出两条轨迹三次多项式的全部待定系数,即有:
。由上述约束关系可以方便的解出两条轨迹三次多项式的全部待定系数,即有:
.jpg)
进一步的,当对三点以上的多轨迹点构成的轨迹进行分析时,只要进行类似推广就可以了,这里不再赘述。 在上面的讨论中,无论轨迹是两点间的轨迹还是多点构成的轨迹。都认为在轨迹的起点和终点位置的瞬时速度和加速度为零。而在很多情况下,机器人在执行完一段目标轨迹后转而会去直接执行下一个目标轨迹。这就需要我们在起点和终点位置更一般的讨论机器人各个关节速度和加速度不为零的情况。
事实上,在离线程序中喷涂机器人在轨迹运动或者轨迹间的运动的速度和加速度信息都是提前根据生产工艺要求设定好的。记一段轨迹起点位置的关节变量,关节速度以及关节加速度分别为:![]() 相应的,轨迹终点位置的关节变量,关节速度,关节加速度记为:
相应的,轨迹终点位置的关节变量,关节速度,关节加速度记为:![]() 。一共六个初始条件对应解六个待定系数。因此将此时关节变量的变化律设为五次多项式,有:
。一共六个初始条件对应解六个待定系数。因此将此时关节变量的变化律设为五次多项式,有:
.jpg)
由初始条件可以列写方程解出各待定系数:
.jpg)
至此由多个轨迹点构成的完整轨迹的控制问题就基本讨论完了。

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-09-18
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









