





基于机器视觉的面粉袋码垛机器人研究中机器人视觉识别系统(下)

2.2.2摄像机参数标定
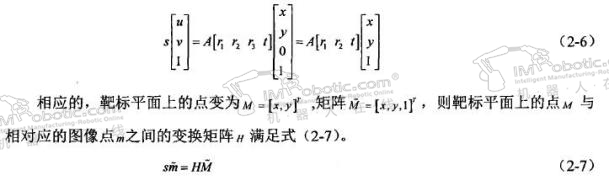
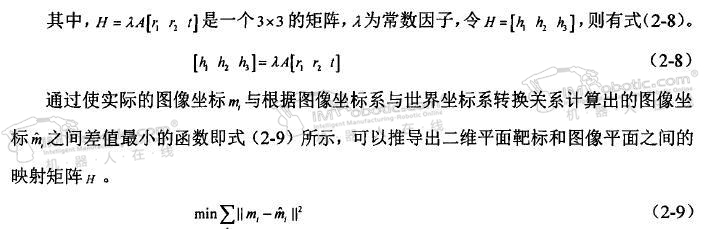
Faugeras等提出了传统的线性模型摄像机标定法,该方法是摄像机标定中比较经典的 方法并作为其后许多标定方法的基础;RogerTsai提出了一种基于径向约束的两步法标定法,首先外部参数由最小二乘法求解超定线性方程得出,再结合非线性优化的方法经超定线性方程解出内部参数;ZhangZ.Y提出了一种摄像机利用二维平面靶标进行标定的方法,仅需要对同一平面靶标在两个以上不相同的方向上拍摄图像,并且摄像机的位置和把标的位置均可自由移动,假定摄像机内部参数在标定时始终不变,只有外部参数改变。相比于其它标定方法张正友标定法操作简便,对环境状态要求低并且标定精度相对较高,因此本论文选用张正友标定法对摄像机进行标定。 张正友的摄像机标定方法是基于针孔成像模型,其标定过程分为两个步骤,一是二维平面靶标和图像平面之间的映射矩阵H,二是摄像机的内外参数矩阵。 (1)求解二维平面靶标与图像平面之间的映射矩阵H 首先在不失一般性的情况下,假设平面靶标放置在世界坐标系的xy平面内。将旋转 矩阵R的第i列记为r1,则上式(2-5)变形为式(2-6)所示。
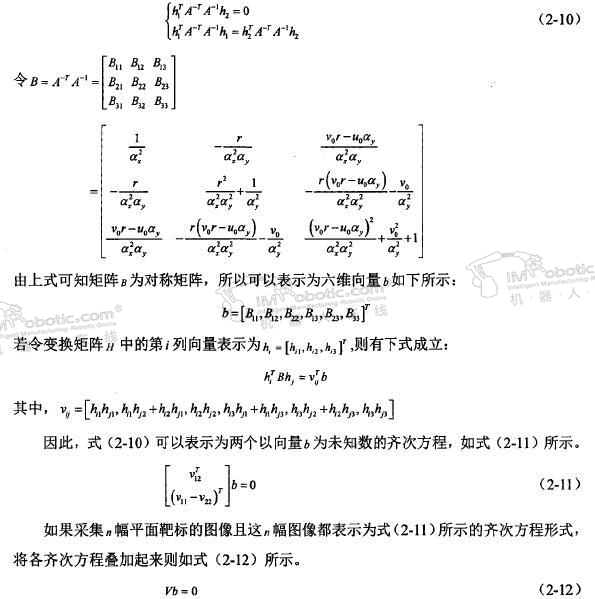
(2)求解摄像机的内外参数矩阵
求解出变换矩阵H后,根据式(2-8)和旋转矩阵R的正交性可以获得两个约束方程为式(2-10)所示。
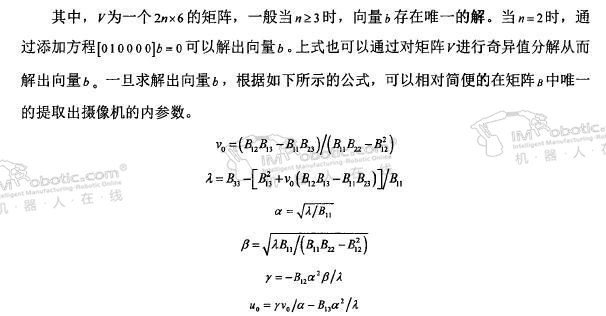
矩阵A求解出来以后,根据式(2-8 )可以很容易的求出每幅图像的外参数矩阵如下所示:

由于摄像机镜头存在畸变现象,如果为了获得更高的标定精度,还需要对最初的标定结果进行优化校正,计算出所有参数的精确值。
2.2.3标定实验
本文所选用的平面靶标为11×7黑白相间的棋盘靶标,方格的大小为25×25mm。使用该摄像机对不同位置和姿态的平面棋盘靶标拍摄了一组标定图像,张正友标定法仅需3张标定图像即可得摄像机参数,但是为减小摄像机的标定误差,该组共拍摄了9张标定图像,如图2.2所示。
.jpg)
.jpg)
码垛机器人摄像机标定实验是在Matlab编程环境下进行,使用Matlab的标定工具箱。工具箱中的主要函数是由加州理工学院Jean-Yves Bouguet博士提供,该工具箱可以适用于不同的标定环境和标定方法。因此,在该工具箱的基础上使用张正友标定法对平面靶标图像进行了标定,求得摄像机的参数如下:
摄像机内参数矩阵为:
.jpg)
2.3图像采集与预处理
2.3.1图像采集
数字图像是由像素点构成的,是以像素点的值为元素组成的数值矩阵。图像的采集也称为图像的数字化,即通过敏感器件接受目标物体在光学透镜的成像,并把其转换为计算机可以处理的电信号,然后再把电信号进行采样和量化就成为一张数字图像。本文选用的摄像机为普通工业CCD摄像机,该摄像机具有130万像素,图像的分辨率为1280×1024像素,而且该相机具有功耗低、稳定性好、分辨率高等特点,通过相机自带的应用接口程序可以方便的控制摄像机进行目标物体的图像采集,适合本文的视觉研究应用。


好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









