





基于机器视觉的面粉袋码垛机器人研究中上位机PC控制程序设计
时间:2017-08-10
阅读:8711
原创

5.3.1控制系统界面设计
本文设计的控制系统是基于上位机PC+PLC的控制结构模式,这是由于整个视觉识别系统的运行需借助上位机PC平台,而且人机交互界面也可以方便的在PC机上完成,而不需单独的触控显示屏。本文的视觉识别程序是在Matlab环境下编写的,并在此基础上利用MatlabGUI强大的工具集设计了控制系统的主界面,以便提供人机交互的工具及系统状态的监控与显示。相比于常用的VC编程环境,使用MatlabGUI进行界面设计可以不脱离Matlab的开发环境,能够更方便的与后台视觉识别程序进行数据的传递和图像的显示,提高程序运行的效率。
码垛机器人控制系统的主界面如图5.2所示,该界面主要包括九大部分,分别为图像采集、识别结果、识别参数、码放位置、数量统计、通信设置、匹配闽值设置、信号指示灯和系统的开始、退出按钮。图像采集窗口用于显示采集到的初始面粉袋图像。识别结果窗口用于显示经处理识别后系统对面粉袋类型及位姿的判别情况。识别参数以数值的形式显示出面粉袋目前的类型、坐标及旋转角度信息。码放位置也是以数值的形式显示出该识别后的面粉袋将被码放的托盘号及在托盘上的位置。数量统计模块记录码垛机器人总共完成码垛的面粉袋数量及各类型面粉袋的数量。匹配阈值设置模块能够使用户方便的修改阈值,而不需查看繁琐的程序,以达到理想的识别效果。通信设置模块用于调节上位机PC与PLC控制器之间串口通信参数的窗口。信号灯分别用于显示各托盘的码放状态及时提醒叉车将码放满的托盘运走,替换成空的托盘。故障指示灯和安全指示灯用于监视垛系统运行情况。

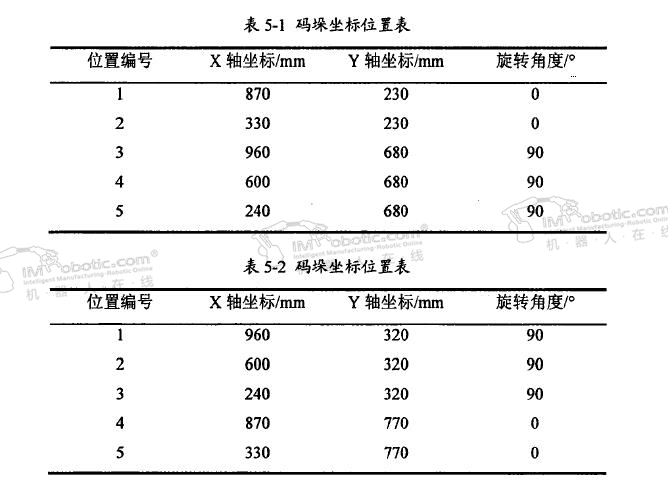
确定码垛机器人的世界坐标系后便可推出各托盘上每层相应面粉袋的中心坐标位置。以托盘A上放置的“特精粉”面粉袋为例,其奇数层5个面粉袋中心坐标位置和角度如表5-1所示,偶数层5个面粉袋中心坐标位置和角度如表5-2所示。
某个面粉袋应该被码放的层数和在该层的码放位置可由该类面粉袋的总数计算得出,假设待码放的面粉袋为该类中的第n个,则码放的垛层数和位置算法流程如图5.4所示。
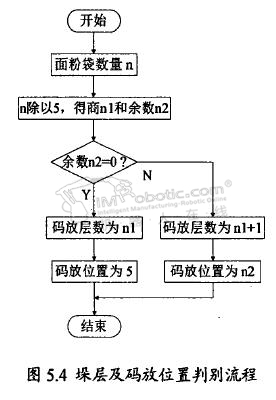
图中商n1的取值为0~8,n2的取值为1~4。由于面粉袋的高度为120mm,推出待码垛面粉袋的层数,层数乘以每袋的高度也就得出其Z轴坐标值。通过程序查表可以迅速的确定出每一袋面粉的码放位置,并将该值传递到PLC控制器驱动伺服电机和手爪完成码垛作业。

码垛机器人
基于机器视觉的面粉袋码垛机器人研究
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









