





码垛机器人动力系统控制与轨迹优化研究中码垛机器人主要结构及功能
时间:2017-08-18
阅读:7801
原创

&2.1码垛机器人主要结构及功能
图2.2为ABT码垛机器人各部分机械组成。
机械部分是码垛机器人的主体,其含有四个自由度,基本结构为平行四边形连杆机构,能实现基座旋转、水平移动、垂直移动和手腕旋转4种运动。水平和垂直方向的运动是通过由前大臂、后大臂、大臂连杆、小臂四个构件组成的平行四边形实现的,而腕部是由小臂、辅助连杆、腕部、三角架构成的连杆机构在运动中保持水平的。将机械手的四轴轴号由腰部到手抓按顺时针方向分别定义为A、B、 C、 D,为表示,其中R代表前后关节C的位移量,e代表腰部关节A旋转角度,Z代表上下关节B的位移量,少则代表腕关节D旋转角度0
码垛机器人的机械本体部分结构紧凑,传动精确度高,可以满足物料码放的精度要求。机器人开放式多轴运动控制系统的核心部件是PC、运动控制器和交流伺服系统[4s]。控制系统提供一个友善的人机界面,作为用户控制机器人运动的操作平台,可以控制机器人在A、B、C、D四个自由度内以单轴或多轴联动方式精确、快速移动到目标点完成定位。

2.2码垛机器人运动系统及特点
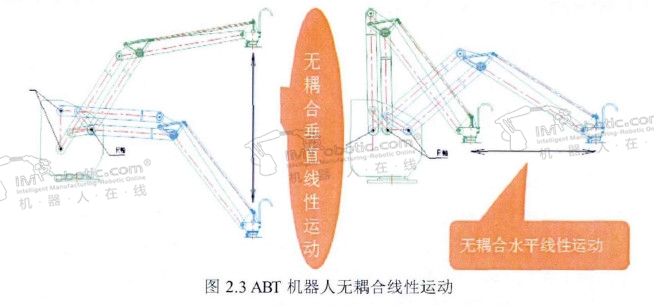
与众多的多关节机器人不同,ABT机器人具有独特的平行四边形连杆线性执行机构:如图2.3所示,末端的运动可以直接实现无祸合单轴运动,使得控制更直接更精确。其次,如图2.4所示,ABT机器人运动空间是圆柱形,比其他关节式码垛机器人的运动范围更大。

2.3码垛机器人动力系统控制总体要求
码垛机器人各轴需要在运动控制器的协调下运动,且由各关节运动合成,因此这是一个典型的机电一体化系统。本系统总体设计主要由机械运动系统、伺服驱动系统、运动控制系统、传感器四大部分组膨,并要求系统满足以下总体功能要求:
(1)机械运动系统:
①机械本体:采用四自由度平行四边形连杆结构,具有紧凑性和可扩展性。
②运动有效行程:A轴—左右330度,B轴—上下2300mm,C轴—前后1500mrn, D轴—手抓330度。详见表2.1及图2.5 0

(2)运动控制系统:
①运动轨迹控制:轨迹控制是控制系统的核心。一方面需要使控制参数以能够示教的方式表现出来,以实现路径控制;另一方面控制系统根据指令进行插补运算,得出每个插补周期A, B, C, D轴各自的坐标驱动量,通过控制伺服电机转动实现运动控制;
②人机界面:设计良好,方便各项操作,同时保证高度可靠作性和安全性 ;
③通讯功能:上位机与控制系统之间需要随时保持通讯连接,以完成信息交换,上位机数控指令的发送、控制系统运行状态的反馈等信息都依靠通讯功能实现。
(3)伺服驱动系统;
①能够自由进行协调和控制运动轴,实现稳定、高效的码垛作业 .
②具备良好的动态响应和实时能力;
③性能良好的伺服电机执行原件,如转矩、转速等与轨迹规划算法匹配。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06









