





码垛机器人动力系统控制与轨迹优化研究中运动轨迹规划及仿真
时间:2017-08-21
阅读:8647
原创

5运动轨迹规划及仿真
5.1轨迹规划算法综述
码垛机器人为设计出性能优越,具有综合特性的轨迹规划曲线,本文采用组合型函数拟合的思想并提出了梯形一三角拟合型函数和高阶多项式拟合函数的概念。同时将非对称这个概念引入到轨迹规划中来,将规划推理出的对称组合曲线进行非对称化,并将设计和现存的曲线进行对比。
为便于算法中参数设定的的统一,算法中涉及到的约束因素如下,
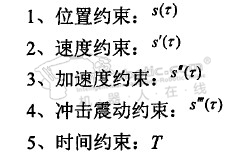
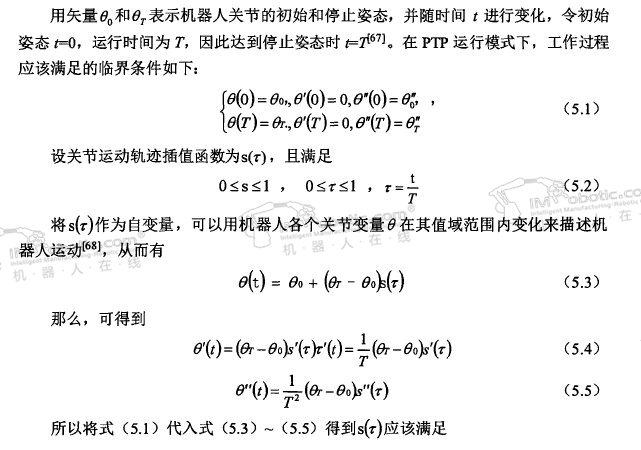

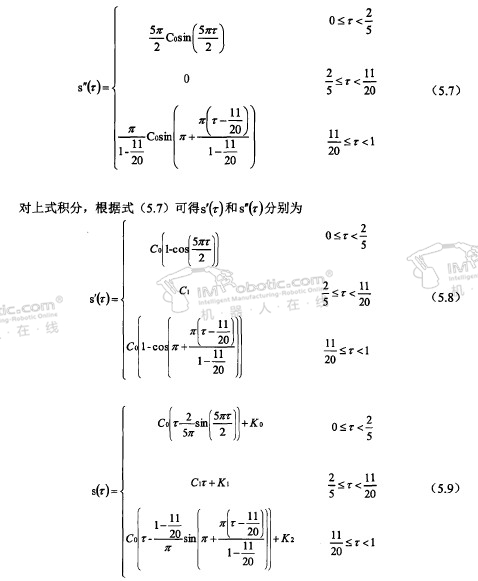
本文提出的梯形一三角拟合型曲线具体的规划方法就是将梯形曲线的斜边以两种不同频率的三角函数拟合。由公式(5.1)~(5.6)推导梯形-三角拟合型加速度分段函数如下:

通过Matlab仿真得到梯形一三角拟合型算法和五次多项式算法的位移、速度、加速度和冲击曲线比较曲线图,如下图5.1所示。
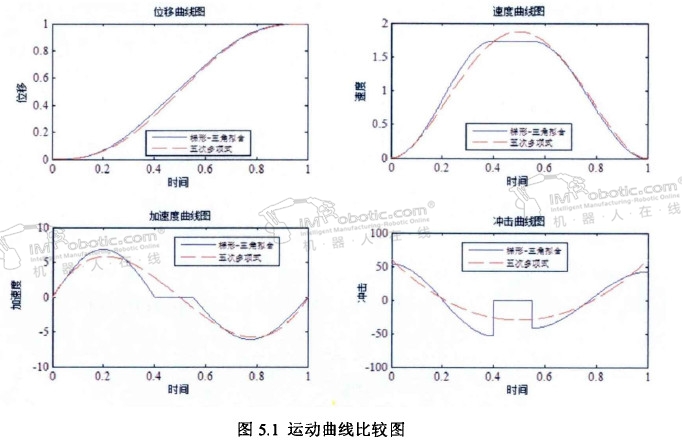
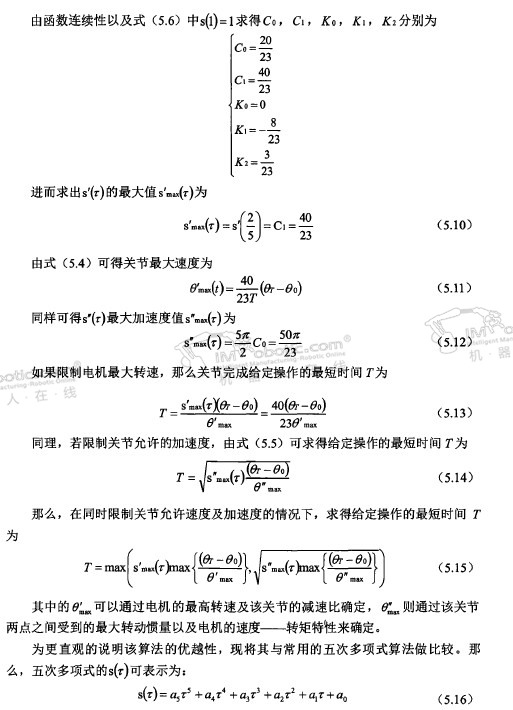
从图5.1可以看出,通过梯形与三角函数拟合,不仅保留了梯形函数速度和加速度较小的特点,也克服了原本梯形函数加速度不连续的缺陷。整个轨迹规划过程不会产生任何异常点,更不用说刚性或柔性冲击。另外通过与五次多项式的对比可见,梯形一三角拟合型算法具有较低的速度、加速度和冲击峰值,而且速度曲线变化相对平缓。因此,参考式((5.13),如果限定电机的最大转速,完成指定动作梯形一三角拟合型算法所需的操作时间就越短,而最短操作时间是机器人轨迹优化的重要标准。因此,可以说明梯形一三角拟合型插值函数方法明显优于常规的五次多项式插值函数方法,并且有利于提高机器人工作效率。
5.1.2高阶多项式拟合型抽值函数
在位置、速度和加速度甚至冲击等多约束的条件下,需要高阶式的多项式插值。因此,本文采用4次多项式与5次多项式以加减速过程1: 1等比分段拟合的方法,得到对称型分段拟合插值函数。即
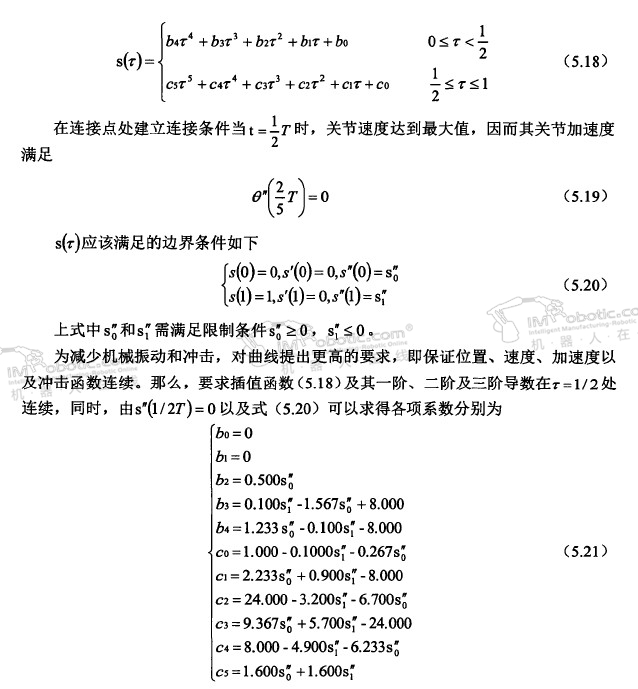
对于较低共振频率的机器人关节,要实现动作又要不引起冲击、不产生残留振动
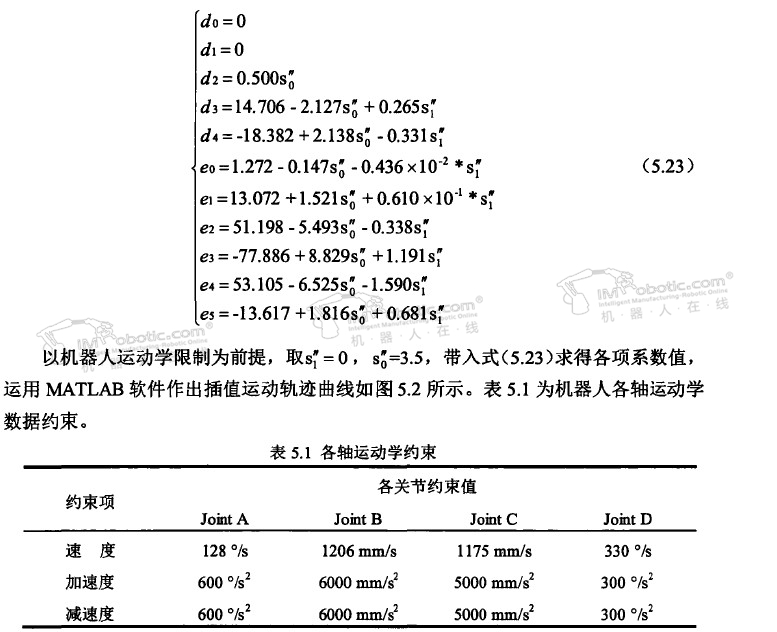
需要对轨迹曲线进行非对称化[}s2}。取具有代表性的加减速比2: 3,希望通过在减速段将加速度及速度控制在较小值,使机器人在停止时更加平稳,从而降低残余振动}l0得到的非对称型多项式拟合函数如下:

同理得到各项系数值如下:
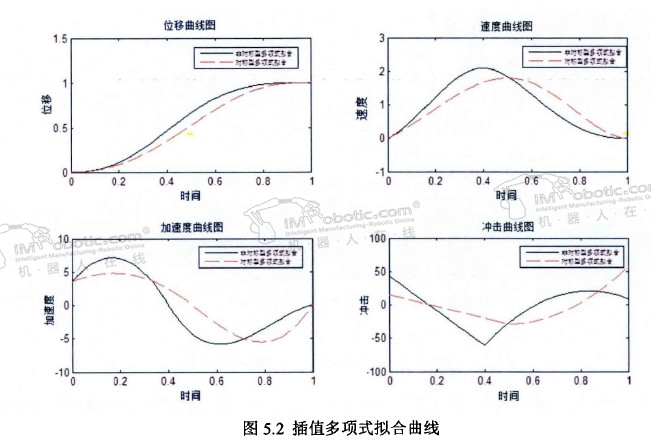
从图5.2看出,两种曲线皆具有连续的速度、加速度及冲击,均可以平滑过渡。与对称型多项式拟合插值相比,应用非对称型插值路线策划方式将增加曲线后半部分的平滑段,可以实现码垛机器人的迅速启动、平稳结束的功能,但却是以增大速度的最值为代价的。根据式(5.13),如果限定电机的最大转速,完成给定操作对称型拟合函数所用的时间较短,相对具有更高的工作效率。所以在现实应用时根据两种形式的优缺点,合理选择,达到最优的运行效果。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









