





码垛机器人动力系统控制与轨迹优化研究中人机界面设计(下)
时间:2017-08-21
阅读:10530
原创

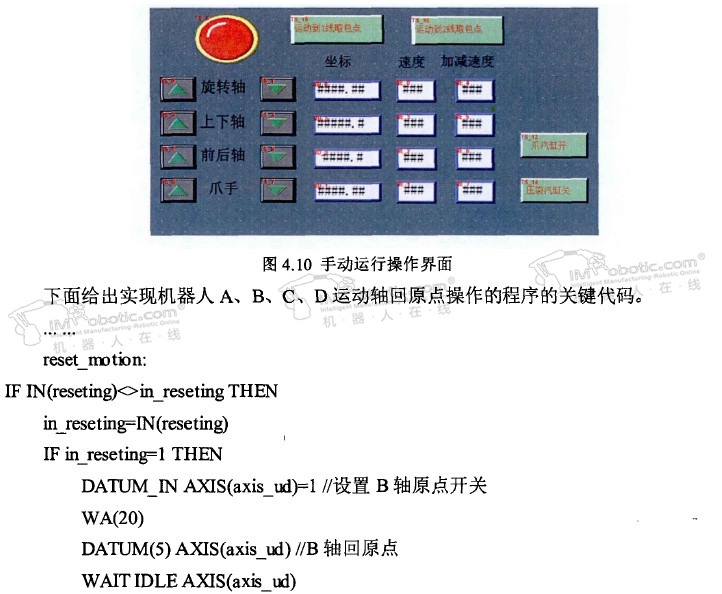
(2)手动运行模块
手动运行方式主要用于实现对机器人位置的手动调整,机器人共有4个轴,可以分别控制运动轴以直线插补方式运动指定的位移距离从而实现点动控制,在移动前,操作者可以设置所需移动的速度和加减速,移动过程中还能够同时查看各个轴的坐标位置点。另外使运动轴返回机械原点也是手动操作的重要功能,同时结合周边装置,添加了用于控制手爪张开与闭合、运动到输送带等外部设备的运动控制命令键。手动运行的操作是基于人机操作界面的,用户只需点击手动运行界面上的控制按钮即可激发TrioMC405运动控制器实现相关功能。手动运行操作界面如图4.10所示。
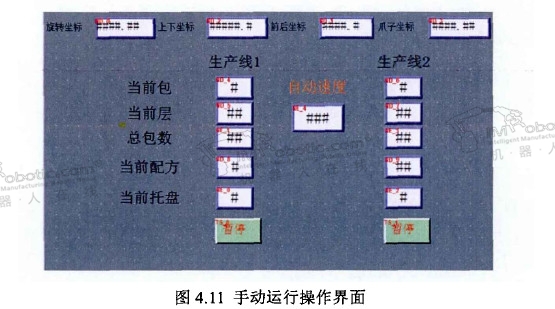
(3)自动运行模块
在自动运行方式中常用的运动控制函数有:凸轮运动函数CAMBOXQ;绝对坐标直线位移函数MOVEABSQ;相对坐标直线位移函数MOVEQ。自动运行方式下操作界面如图4.110
当前包:用于显示机器人当前堆垛到的具体某层的物料数目。
当前层:用于显示机器人当前堆垛到的具体层数。
总包数:用于显示机器人当前堆垛的物料总数。
当前配方:用于显示当前选择的堆垛方式,具体配方在示教模式下事先设定好,共16种配方供操作者选择,点击输入框,即可换取所需的配方。
暂停:单击【暂停】按钮,对应生产线机器人执行暂停功能,再次单击【暂停】按钮,取消暂停功能,程序将从暂停点处继续执行,直到程序结束。
生产线控制:爬坡段、振动整形段、抓取段各有一个光电传感器、判断是否有物料飞当物料满时,生产相控制柜内的PLC自动控制停止生产线。每个流水线有人工操作装置,能够实现人工控制流水线的启婷。流水线控制柜上有急停装置。
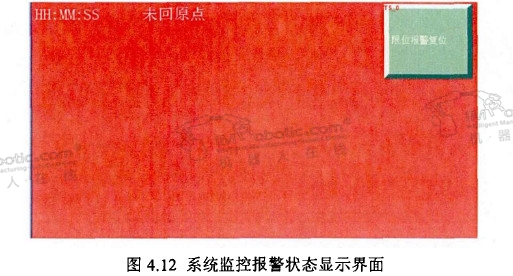
(4)监控报警模块
本系统软件中监控模块主要负责对机器人的A、B、C、D轴是否回原点,是否超出正负运动限位及伺服系统是否有报警信号等进行监控。监控报警模块的界面如图4.12所示。正如4.12图所示,当前报警信号提示为:未回原点,此时控制柜上的指示灯红灯会闪烁(指示灯有红、黄、绿三色:红色代表此时状态报警,黄色代表此时状态为暂停,绿色代表正常工作状况)。因此,当机器运动出现故障或者报警状态时,下位机会执行控制程序急停命令从而避免机械系统碰撞或瘫痪,用户可直观从显示屏上查看报警原因并做相关处理。
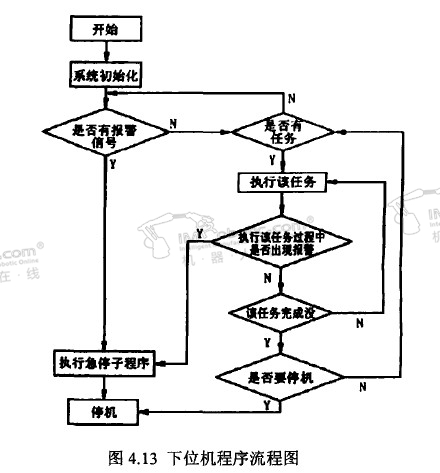
(5)下位机控制程序
下位机控制程序采用Trio Basic编程语言,编辑用于控制机器运动与触发的程序,且可以针对不同的运动要求进行调整。运动控制器将在Motion Perfect V2软件下编写好的控制算法保存在其存储器中,从而触发固化在其中的插补算法,控制器会根据结果实时向驱动器发送运行控制脉冲以实现电机转动。下位机程序的执行、暂停或停止将由系统管理软件进行控制。
MC405能够实现多任务编译,多任务是指可以将庞杂的整体动作拆分成几个互不干扰的分支模块来进行,简单快捷的实现装置动作的控制。MC405最多可以编辑14个独立的任务,鉴于这种特征,采用模块化的思想将整个工程项目根据功能类型编写成不同的模块,而后设定不同的运行优先级。MC405利用不同模块中VR参数情况和自身的I/O情况查询不同模块并完成与触摸屏的交互。
图4.13为下位机程序流程图。
4.4本章小结
本章分别从软件和硬件上总体介绍了机器人动力系统控制平台。首先介绍了伺服驱动系统的组成及控制方式,结合码垛机器人的PTP运动模式选取半闭环位置伺服控制方式。从静态性能设计和动态性能设计两方面着手选取合适的伺服电机及伺服驱动器,而后搭建和连接硬件控制及驱动系统的信号线路和电气线路。最后设计开发了软件控制系统中的人机界面,重点介绍了触摸屏界面括参数设置、手动运行、自动运行和监控报警的主要几个模块的功能和实现方法。总体完成了机器人动力控制系统整体设计。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









