





码垛机器人动力系统控制与轨迹优化研究中人机界面设计(上)
时间:2017-08-21
阅读:9056
原创

4.3.2人机界面设计
码垛机器人可视化操作界面可以实现操作者与控制系统间的通讯互动,并且可以对控制系统各运动模块进行操作。设计友好的人机操作界面将使得用户只需要按照界面上图形或文字的提示即可方便完成相关功能的操作,简一单、直观、方便。本文选用的威纶系统可触摸式屏幕是在行业中应用较广的一种,选择的中央处理器含有32位RISC(间接命令集),它的主要特点是效率高、速度快、操作简单、稳定耐用、综合性能强。兼容行业中应用广泛的PLC,特别是可以实现对ACR9000控制器的改进研究,是其他屏幕所没有的优点。其中数字显示与ACR9000相应的P参数链接而获得的。其他状态显示和操作,可以完成演示教学再现、输入初始条件、手动运行、自动运行等动作。利用显示情况和坐标对机器人的行动轨迹进行实时监测。
机器人开机后,触摸屏首先进入如下操作界面如图4.8所示,在界面的最下方,提供手动、自动、参数设置等切换按钮,当需要进入相应操作模式,只需点击相应的按钮即可。
(1)参数设置模块
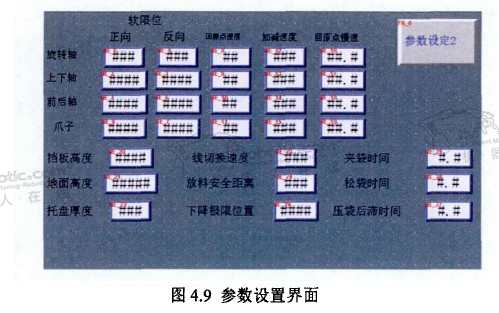
参数设置模块中主要对运动速度及加减速度、爬行和手动速度、软件行程限位、硬件行程限位信号输入接口、原点信号输入接口、进给保持信号输入接口等。同时提供物性参数如挡板高度、托盘厚度、抓包停滞时间、松包停止时间等。设定界面如图4.9所示。
下面将重点介绍需要设置的主要参数的功能及用法:
加速度参数ACCEL、减速度参数DECEL:运动轴将按照加速度参数ACCEL设置的值加速到设定速度值后,保持以SPEED度恒速运动直到运动快结束时,以减速度DEC EL减速到零。
回原点速度:运动轴以回原点速度设置的值运动到机械原点,在复位工作模式下,主控系统管理单元以支持实时仿真为基础与机器人的开始运动状态保持一致。
爬行速度参数CREEP:爬行速度用于进行原点搜寻。运动轴以设置的爬行速度回到安装轴上的原点,并触发原点信号时,运动轴还将继续向前运动很小的一段距离才停止,此后将以CREEP速度非常缓慢的反向运动直到原点开关复位时停止运动,该点即为准确的原点。
码垛机器人正、反软限位参数FS LIMIT, RS LIMIT:用于设置软件行程限位值。当运动轴在正反向运动的坐标值到达限位时,MC控制单元会减速到零,并取消运动,避免发生机械碰撞,此参数可作为运动轴第一层保护措施。
以上重点介绍了主要轴参数的含义和用法,在对A、B、C、D轴的轴参数进行设置时,只需要在相应的编辑框中输入想要需要设置的值即可实现轴参数的重新设置。其他参数值由现场环境和操作人员需求决定,不做具体说明。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









