





码垛机器人动力系统控制与轨迹优化研究中通信线路连接
时间:2017-08-21
阅读:7988
原创

4.2通信线路连接
4.2.1驱动器与PC连接
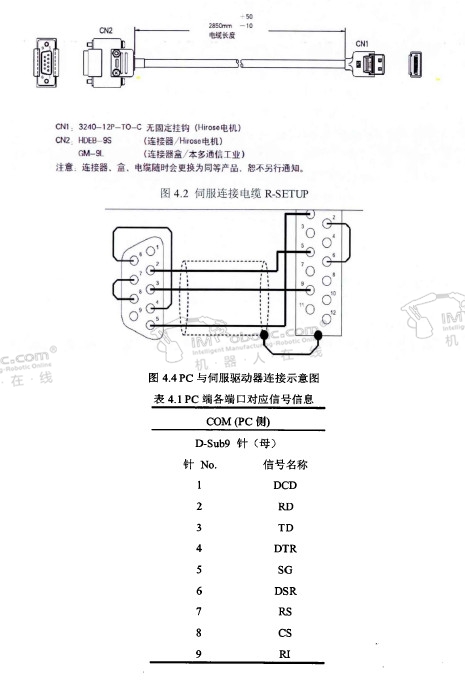
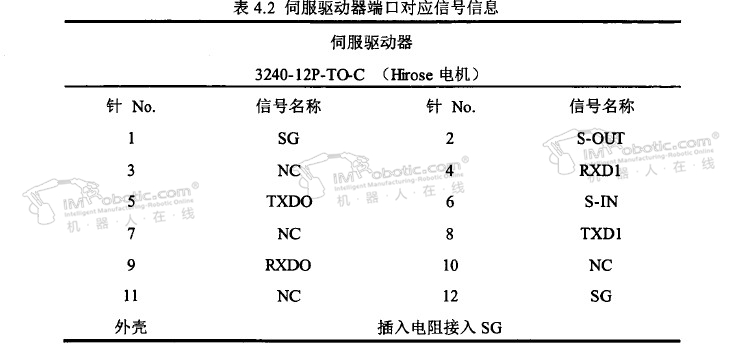
码垛机器人Trio MC405与操作模块的通讯包括PC和触摸屏这两者的通信。先在PC机上将控制程序编写好,用串行编程电缆经PC上的COM接口与MC405上的编程接口serial A相连接,便可实现PC与控制器间的通讯。PC与伺服驱动器之间通过R SETUP进行串口通讯,其连接电缆如图4.2,通信电路连接及PC与伺服驱动器端口信号分别如图4.3及表4.1和表4.2 。
4.2.2控制器的CAN口连接
用CAN总线做I/O扩展扩展模块比较多,有数字量输入、输出;模拟量输入、输出;继电器输出。其扩展连接图如图4.4所示。

4.2.3控制器与触摸屏的连接
以太网端口安装以10/100 base一T为标准,这就与MC405的主要通信连接。许多协议支持Telnet, Modbus TCP, Ethernet IP和Trio PC Motions
MC405有一个建于RS232端口,一个内置双RS485通道作为工业通信系统。不管是RS232端口还是RS485端口都可以配置来运行Modbus。如果内置的CAN通道不能用于连接I /O模块,它可以被用于CAN通信。例如DeviceNet,CANopen等等。
由运动控制器设备上的一个串行接口(常用的如RS232或RS485),可以较容易的实现与绝大多数第三方的操作设备的连接通讯。
Trio控制器的系统软件支持Modbus RTU协议以便与H1VB人机交互系统互通。Modbus协议的工作方式为点对点通讯,例如它提供运动控制器与一个可操作键盘触摸屏之间的通讯,Trio控制器中的Portl ( RS232 )或Port2 C RS485 )支持协议运行,其中的Port是系统编程端口,没有Modbus的协议选项。控制卡具体引脚功能说明见表4.3。
本系统中的触摸屏选用威纶的MT6100iV,通过RS232实现它与MC405进行串口通讯,具体通讯线路如图4.5所示。

4.2.4 MC405与何服驱动器之伺的连接
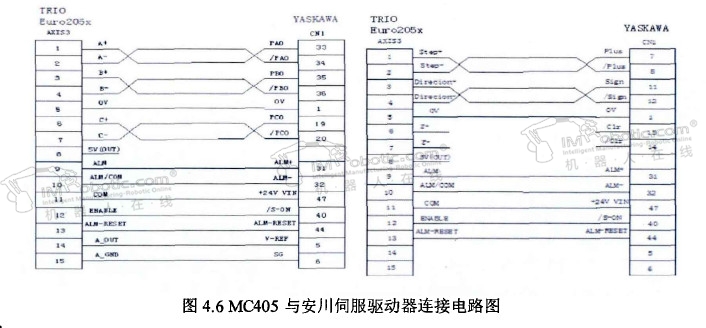
图4.6为MC405控制器与安川伺服控制器之间的连线方式。
4.2.5其他信号线路
码垛机器人在调试过程中,上位机和触摸屏是通过USB下载线进行通讯的,而上位机与MC405的通讯是通过Ethernet实现的。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









