





码垛机器人动力系统控制与轨迹优化研究中伺服电机及伺服驱动器选型
时间:2017-08-21
阅读:8652
原创

4.1.2伺服电机及伺服驱动器选型
为提升码垛机器人动力系统特性,对于结构本体主要需要考虑三个方面:第一,电机的最大转速;第二、电机转矩即点击拖动负载的能力;第三、机械本体的承载能力,即所能承受的惯性力。因此,如何选取合适的机器人电机至关重要。
伺服电机一般有两种:直流伺服电机和交流伺服电机。由于直流伺服电机具备出色的速度调节性能,因此,80年代初至90年代中期,直流伺服电机系统在速度调节要求较高的场合一直占主导地位。但其却存在一些固有的缺点,即:电刷和换向器易磨损,维护麻烦;结构复杂,制造困难,成本高。而交流伺服电机则没有上述缺点。而且在相同体积规格下,交流伺服电机可以提供更高的的输出功率,实验数据表明较直流伺服电机,其功率可提高10%~70%。除此之外,交流伺服电机还可以提供更高的转速。因此,直流电机渐渐被交流电机所取代。
伺服电机采用光电编码器,当电机旋转时,作为伺服系统的速度反馈和位置反馈元件,编码器输出脉冲反馈到伺服驱动器。脉冲个数决定伺服电机转动角度,而输出频率决定电机转速。
通用伺服电机必须有驱动器才能旋转,一组伺服电机系统的电机与驱动器是相互匹配的,用户不可任意与其他型号混合配搭,制造厂家已匹配好,无需用户自巳匹配。
电机的选型需要同时考虑电机的静态性能和动态性能两方面,其中电机的静态性能包括转速、调速范围和转矩,而动态性能则是其带动负载的能力以及还与驱动器有关。
其静态性能中的转速的大小用公式表示为:
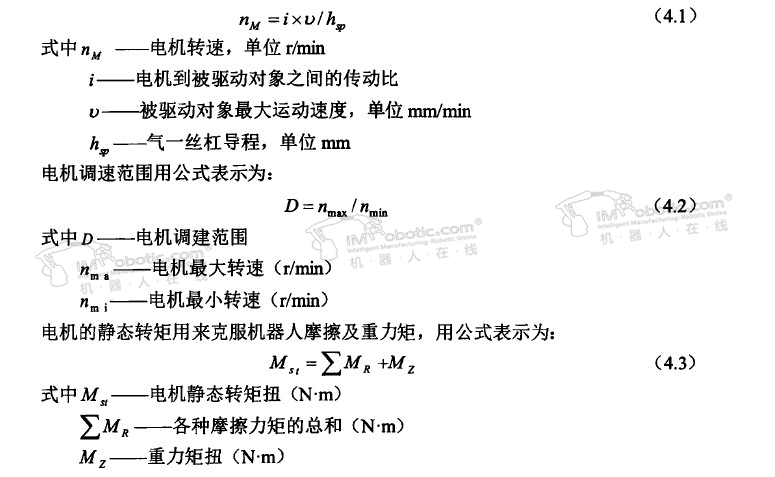
通过上述电机静态的设计的方法,可以初步选择符合要求的的电机,接下来就要考虑伺服驱动系统的动态设计。码垛机器人系统采用SANYO DENKI交流伺服电机,其具有低惯性、高响应、快速伺服的特性,其P系列电机最快转速达到4500rpm, R系列的最高转速达到6000rpm,根据计算可初步选择机器人腰部、垂直臂、水平臂A,B, C三轴驱动器型号为R系列RS lAl SAA,对应的主配电机型号为P60B18450RXSC 4.SKW/200VAC/24.9A)。位于腕部的电机主要是克服抓手和米袋旋转时产生的摩擦力矩,该摩擦力矩为轴承的滚动摩擦,数值较小[fuel,初步选择D轴驱动器型号为R系列RS 1 A1 SAAS,对应的主配电机型号为3.SKW P60B18350HXS 。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









