





码垛机器人动力系统控制与轨迹优化研究中机器人动力系统控制平台
时间:2017-08-18
阅读:7480
原创

机器人动力系统控制平台
码垛机器人的动力系统控制平台,包括硬件部分和软件部分。硬件系统由下位机运动控制器、伺服驱动系统以及终端执行机构组成,软件系统主要由PC操作软件和人机交互构成。
硬件总体系统主要运用开放性主从运动控制思路,主控模块运用PC+Trio MC405运动控制器的方案,这种控制机构具有控制精度高,实时性好,易于实现高速,后期扩展方便的优点,目前广泛运用于工程实践中。控制器接受来自上位机根据用户设定的目标点和起始点的轨迹规划进行相关插补运算并将插补数据传送给伺服驱动系统和执行器。而机器人运动主要通过伺服电机接受来自伺服驱动器的脉冲信号完成位置及速度的控制。
4.1伺服驱动系统
4.1.1何服驱动系统介绍
目前市场上机器人的驱动方式多种多样,例如液压、气压等等,但是他们都有各自的局限性。如液压驱动虽然驱动力较大,但价格昂贵、易渗易漏而且会对环境造成污染;气压虽然价格低廉,环境污染小,但是其控制精确度难以保证。随着伺服电机技术发展日趋完善,控制精度日渐提高,机器人的驱动方式也就逐渐转为伺服电机驱动。
伺服驱动系统由伺服电机、控制器以及驱动装置组成。按照控制方式的差别,通常可分为三类控制信号方式:Pcommand(位置伺服),V command(位置伺服),T command(转矩伺服)。较通用的控制方法为P command及V command。
搬运机器人在正常工作中的运动模式为点位运动,机器人的末端执行器从一点准确而迅速的定位到另一点上。因此其运动过程中对位置精度的控制较为严格,而对末端操作装置并无严格的力矩控制要求,这就决定了码垛机器人的运动控制类型属于位置伺服控制。
综合机械结构、成本和精度要求,本文码垛机器人系统采用半闭环控制系统,将位置检测设备安装在电机轴端,并采用增量编码器。位置伺服驱动系统构成如图4.1所示。
位置伺服驱动内部包含:位置控制单元、速度控制单元、驱动元件(电机)、检测与反馈单元和机械执行器。
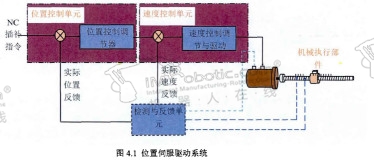
其中速度控制单元作为过渡单元主要接受并调节运算来自控制单元的速度指令信号以达到稳速功能,然后该信号经过转换再经由功率放大器得到驱动电机的控制量,最后使驱动电机按要求运行。简言之:调节、变换、功放。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









