





码垛机器人动力系统控制与轨迹优化研究中控制器的编程软件
时间:2017-08-18
阅读:8514
原创

3.3.2控制器的编程软件
码垛机器人Motion perfectV3编程软件可以在windows系统下实现对机器人各个运动轴的配置,运动程序的编写和调试。支持在线编程调试、在线控制和监测、离线运动仿真等功能。图3.6为软件主界面。

下面重点介绍本文在工程项目程序中的所用到的工具操作要领。
(1)轴参数设置
该参数显示的是当前所有配置好的运动轴的状态,其界面如图3.7所示。

如图3.8所示,数字vo状态界面可以对系统中的v0信号进行监测和控制。当有信号从输入通道输入时,相应的通道就会提示,显示不同的颜色,提示有信号输入。图3.8中显示通道3有信号量输入,通道3就显示了不同的颜色。数字信号量的输出,可以由输出通道输出,当点击相应的输出通道,当其指示颜色改变为黄色的时候,表明数字量已经由输出通道输出。
(3)模拟量输入观察窗口

如图3.9,模拟量输入观察窗口只有在控制系统中有模拟量输入时才会显示,模拟量的值经过转换成十进制后,可以在屏幕上直接观察到。
(4) TABLE变量观察窗口
如图3.10,运动控制器可以提供8000个表格变量,可以大量存储运动轨迹数据。

(5) VR变量观察窗口
VR变量是系统提供的重要的全局变量,通用于在控制器内不同的程序文件,即可以存储数据又可以用作逻辑判断。其界面、操作和Table变量都非常相似。
(6)示波器显示窗口
如图3.11,软件当中还有示波器,它是用来跟踪和监测各个运动轴的运动参数的,它可以同时监测一组不同的信号。监测到的参数用不同的颜色来进行区分,各路参数的颜色与控制区域的颜色相似,对应其控制参数。控制区域可以进行检测信号的控制,可以选择需要监控的信号参数,调整需要控制的轴、通道、界面刻度等等。也可以对显示的曲线和图像进行调整,比如调整曲线的设置纵向偏移量、复位偏移量、尺标等。
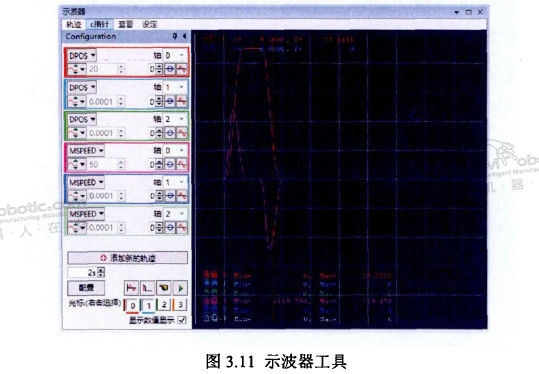
在软件的交互界面的左下角,还可以对时间进行基准设置(即栅格所代表时间的大小)、触发类型的选择(连续触发还是单次触发、手动触发还是程序触发)[60]。当按下界面上的Trigger按钮,示波器就会开始工作,进行轨迹的跟踪和监测。
(7)终端

如图3.12, Channel"0”用于命令行输入。Channel"5, 6} 7"则用来与控制器上的程序通讯。
3.3.3控制器的编程示例
本小节主要通过举一个简单的运动控制实例说明Motion Perfect V3的使用功能。程序编写如下:
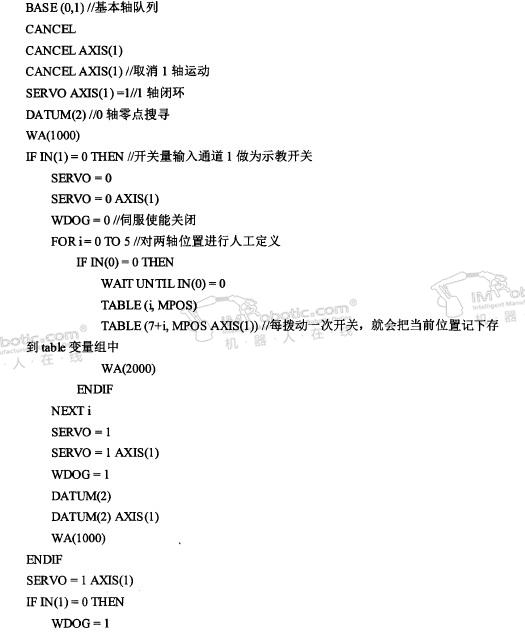
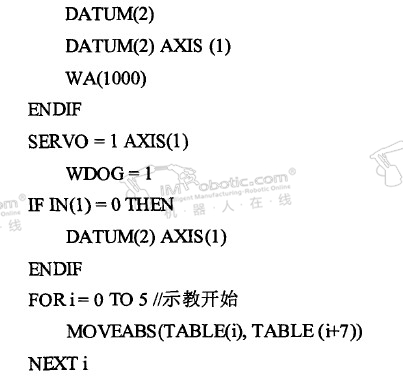
程序功能说明:
在控制程序当中,设定数字量信号输入通道0和1,并分别连接到运动系统的两个控制开关。
控制开始时先把开关信号1设置为0,示教程序开始工作,其过程是开关0触发一次,即打开之后再闭合闭合。人工设置完两运动轴的预期位置,循环做s次。完成之后,控制器就会按照示教的工作过程进行预期的运动。如果想要重复之前的运动,设置开关1为高,运行程序就可以自动重复相应的运动。
3.4本章小结
本章对作为码垛机器人下位机运动控制系统核心的TrioMC405运动控制器的性能特点、工作原理及应用作了详细的介绍和分析。对基于编程和调试的集成软件环境MPV3下的编程语言及运动控制命令做了研究,同时介绍了MPV3软件中各部分工具功能和操作要领,并给出了简单的运动控制编程实例帮助进一步的理解。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









