





码垛机器人动力系统控制与轨迹优化研究中硬件性能
时间:2017-08-18
阅读:6908
原创

3.2.2硬件性能
码垛机器人控制系统的控制器的主要功能是接收对应的输入信号和参数,通过处理器进行计算,再把相应的信号输出到对应的执行器,执行器收到信号后做出相应的运动,达到预期运动。
主要负责的工作任务如下:
(1)运动参数、控制信号获取
控制机器人各个手臂完成预期的运动轨迹,就需要输入相应的运动控制参数,比如爬行速度、高度、加速度等运。控制运动的运动参数一般从人机交互界面传送到控制器里面。运动系统的控制信号包括各种软硬件限位信号,到位信号等,信号的输入或数字量输入转化为控制器能够识别的信号。
(2)对运动参数的运算
用户通过人机交互界面输入的运动控制参数,通常不是控制器能够识别的信号,这就需要程序编译后转换为控制器可以识别的信号,这些转换模块也是由控制器内的控制子程序进行完成的。
(3)运动控制
MC405接受到相应的参数后,会根据这些控制信息执行编好的运动控制程序,信号输出到对应的执行部件,硬件就根据相应的指令运行,达到预期的运动。
(4)接受反馈,监控运动的执行情况
而控制器控制各个部件的控制信号后,控制器根据各运动轴的反馈的传感器信号,对各个部件的运动执行情况做出分辨及相应的调控。
(5)上传控制信息
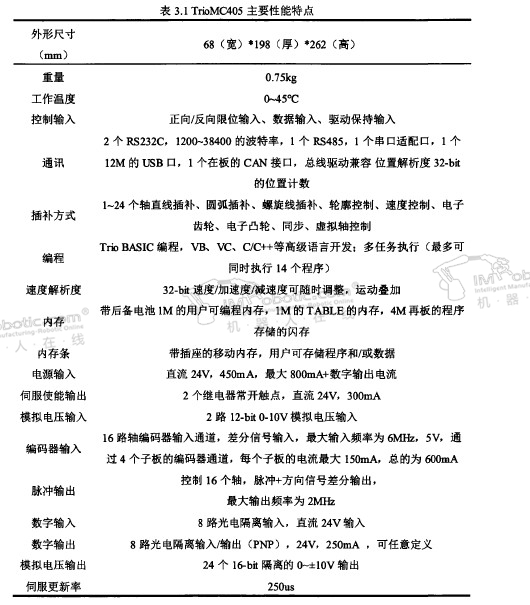
工作人员进行运动控制或者调试时,可以监控运动系统的实际运行情况,工作人员可以把控制器里面的相关信息上传到PC或者触摸屏,对参数进行调整和控制,从而达到工作人员的要求。该控制器的主要性能特点详如表3.1所示:
3.3运动控制器的编程
3.3.1控制器的运动控制命令
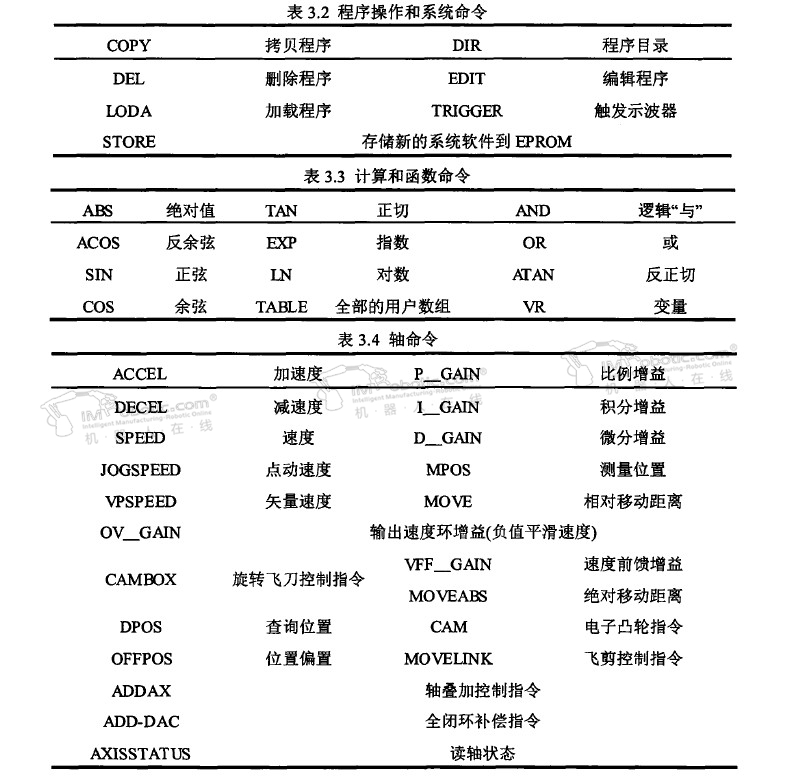
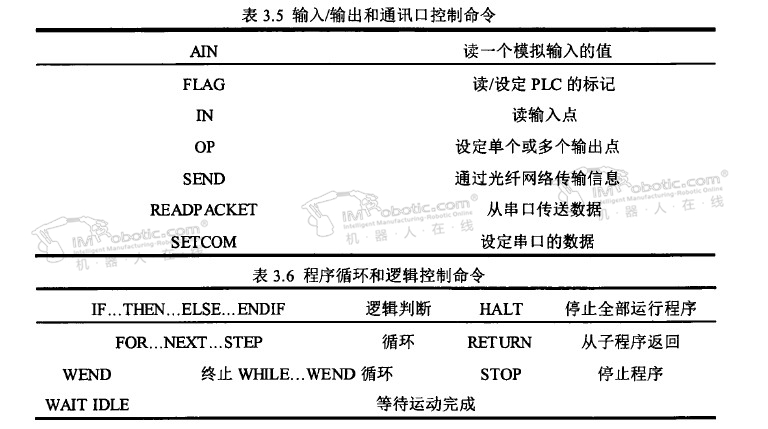
Trio BASIC可编程控制语言采用的是自己集成的运动控制命令,用户可以应用这些命令控制码垛机器人的的运动过程以及获取控制系统内部的控制参数和状态,常见的部
分命令示例见表3.2、表3.3、表3.4、表3.5和表3.6 。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06









