





码垛机器人动力系统控制与轨迹优化研究中运动控制器的性能和特点
时间:2017-08-18
阅读:6928
原创

3.2码垛机器人运动控制器的性能和特点
3.2.1码垛机器人运动控制器的主要特点
(1)可扩展性
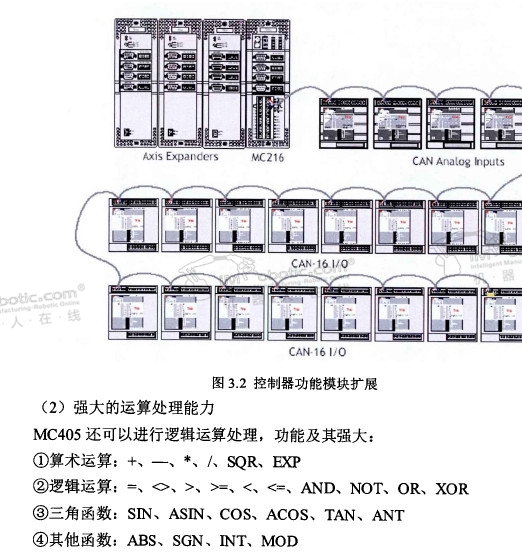
如图3.2所示,该运动控制器提供一系列不同功能的模块,用户可以根据实际工程应用进行组合,达到用户需求。
①运动轴扩展
C Daughter Board)扩展。
②数字量输入和数字量输出也可以进行扩展,但是最多可以做256个双向I/O点
扩展。
③模拟量输入和模拟量输出也可以进行扩展,但是最多只可以进行32路12位的
模拟量输入扩展。
④位置反馈接口扩展(AB/Z、SSI、SSN/COS
⑤现场总线接口扩展:CAN、SRCOSII、Ethemet、ProfiBus、USB、 DeviceNet、ModBUS、RS232C、 RS485、HostLink。
(3)多种运行方式
①独立脱机运行
机器人控制程序应用Trio BASIC编程语言,编程模拟调试后可以下载至控制器中进行离线调试或者联机运行。
②基于计算机方式
用VB、VC、De加hi、 C++、Builder等高级语言调用运动函数。
a. PIC总线方式
b. USB高速串口通讯
c. Ethernet Link通讯
C4)现场总线控制:如ProfiBus、DeviceNet、 Ethernet、CanOpen、SERCOS等。
多模块运行,所谓多模块就是将复杂的运动控制程序独立编程,通过主程序来调
用各个独立的模块来进行执行,每个模块是独立的,这样就可以使得运动控制程序的
编程以及运动控制更加简单和清楚。
同时,控制系统也可以将“后台自动运行”和‘火机界面操作”等模块任务来独立执
行,达到简化编程,易于简单明了。
控制器最多可同时执行14个独立程序。
(5)可接受多种类型的位置反馈信号

(6)与伺服运动器多种接口形式
CANopen (Controller Area Network吨);
DeviceNET;
Profibus;
SERCOSII(Serial Realtime Communication System);
SLM(Speed Loop Module )。
(7)编程方便
Trio Basic;
OCX Co}onent;
在VB、 VC、Delphi、C++Builder中,直接调用运动函数。

码垛机器人
码垛机器人动力系统控制与轨迹优化研究
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









