





基于ROS的码垛机器人运动仿真及轨迹规划中码垛机器人的机械结构
时间:2017-08-24
阅读:9264
原创

2.1码垛机器人的机械结构
2.1.1机构简介
该码垛机器人主要对块状类、箱装类或者编制袋类的物品进行码垛作业。其工作负载可达到130公斤,其码垛能力峰值循环速度可以达到1500次/小时。使用三维绘图软件Soiidwork、绘制码垛机器人装配体组成,其三维图如图2-1所示。

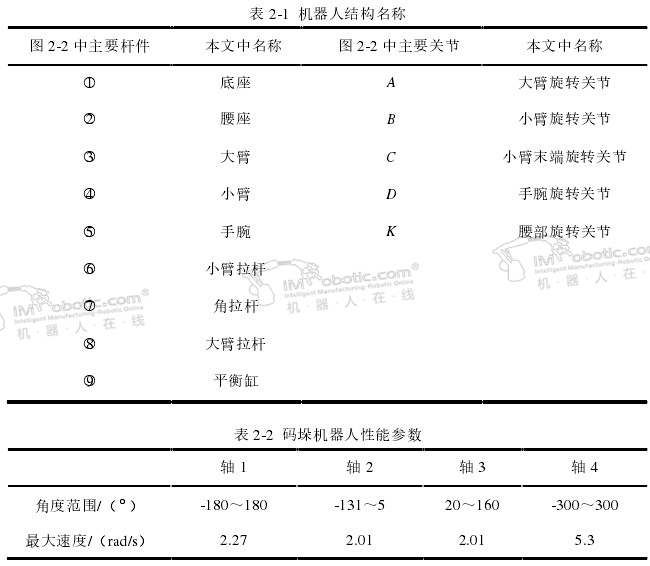
然后根据码垛机器人的主要杆件结构,绘制结构简图如图2-2所示,其主要杆件使用数字编号,关节使用字母编号,列于表2-1中。该码垛机器人主要由9个主要杆件部分组成,是一个具有平行四边形机构的4自由度混联工业机器人,有4个主动旋转关节,分别为腰部旋转关节、大臂旋转关节、小臂旋转关节以及手腕旋转关节,各关节分别通过各伺服电机驱动回转运动,依靠RV减速器实现变速控制,既腰部旋转关节使得腰座与基座能够旋转运动,大臂旋转关节使得腰座与大臂之间作旋转运动,小臂旋转关节使得大臂与小臂之间作旋转运动,手腕旋转关节可以使末端操作手旋转运动。码垛机器人的各关节角度运动范围以及最大运行速度如表2-2所示。
2.1.2码垛机器人的模型简化
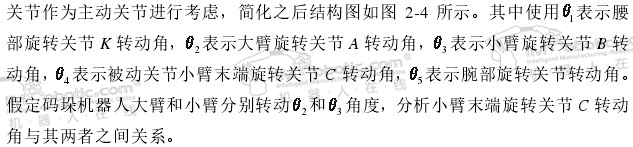
该码垛机器人的是混联机器人,对其采用D-H参数法进行建模,就需要先对机器人的平行四边形机构ABGH和BCEF进行简化,确定C点处被动关节的运动关系,机器人运动学简图如图2-3所示。其次,由于ROS中建立URDF文件的时候,目前还不支持具有闭合链的结构,所以需要进行简化,而且将C点处的被动
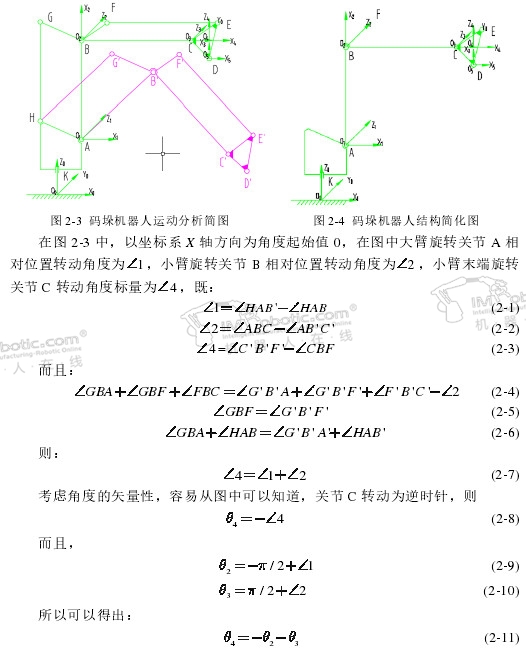
从而可以得出码垛机器人小臂末端旋转关节C与大臂旋转关节、小臂旋转关节角度变化的关系。

码垛机器人
基于ROS的码垛机器人运动仿真及轨迹规划
技术干货

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









