





基于ROS的码垛机器人运动仿真及轨迹规划中基于ROS的仿真平台搭建
时间:2017-08-24
阅读:9418
原创

第3章基于ROS的仿真平台搭建
码垛机器人的基于ROS的仿真平台的搭建主要是借助于机器人操作系统ROS及RViz 3 D可视化工具实现,本章首先对机器人操作系统ROS的重要概念进行相关介绍,其次使用统一的机器人描述格式URDF(Unified Robot DescriptionFormat)对机器人模型进行构建,并借助RViz用于码垛机器人三维仿真模型的显示,然后对码垛机器人的运动控制的相关节点进行设计与编译,对机器人运动控制的消息类型进行选择,对控制与启动文件进行配置,最后分析机器人正运动学、逆运动学、避障运动的作业流程,以及对整体系统节点图进行绘制。
3.1 ROS基本组成
ROS包含计算图级、文件系统级、社区级三个层面的概念。其中计算图级是ROS处理数据、描述程序运行的重要层面,主要包含节点(node)、消息(message ),主题(topic、服务(service、节点控制器(RO S M aster)等重要概念。
(1)节点 节点是一系列程序进程。例如,为完成码垛机器人在ROS系统中实现运动仿真,需要控制器节点控制各个关节的转动,轨迹规划节点实现机器人的轨迹规划运动,以及机器人状态节点记录机器人的位姿信息,显示节点提供3D可视化图形界面等。
(2)消息 消息是节点之间相互通讯的一种数据结构。
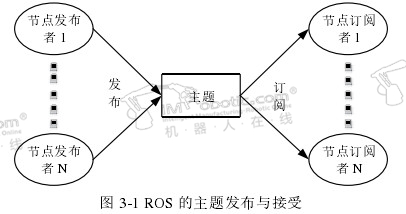
(3)主题消息以一种发布/订阅的方式传递,如图3-1所示。一个主题的消息可以由多个节点同时订阅或者多个节点可以同时向该主题发布消息,并且发布者和订阅者是独立的。
(4)服务通过服务来实现“请求/回应”式的消息单项传输的机制。
(5)节点控制器节点控制器是计算图级中控制所有节点顺利运行的保障。节点控制器控订阅和发布消息的模型如图3-2所示:


码垛机器人
基于ROS的码垛机器人运动仿真及轨迹规划
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









