





基于ROS的码垛机器人运动仿真及轨迹规划中工作空间分析

2.4工作空间分析
工作空间是评价码垛机器人使用性能的一项重要指标,因为机器人末端操作抓手只能在其工作范围内工作,所以码垛的物品必须严格在工作空间允许的范围内,否则码垛工作无法进行。由前面运动学的分析,可以知道,其末端抓手能到达的位置主要由腰部旋转关节转角、大臂旋转关节转角、小臂旋转关节转角决定。
由于该码垛机器人杆件之间不能发生干涉的关系,所以小臂旋转关节的转角
通过D-H参数法建立码垛机器人的正运动学,采用蒙特卡洛方法对机器人工作空间求解,其过程如下:
(1)给各个关节在其取值范围内随机赋值,对于各个关节变量在其许可转角范围内随机产生N个数值,形成N个关节空间向量;
(2)利用机器人正运动学方程表达式计算出工作空间内机器人末端对应的随机点在基座标系中的位置。
(3)画出上一步中得到的基座标系中所有的末端位置,从而生成机器人工作空间的点云图,直观地观察工作空间的情况。
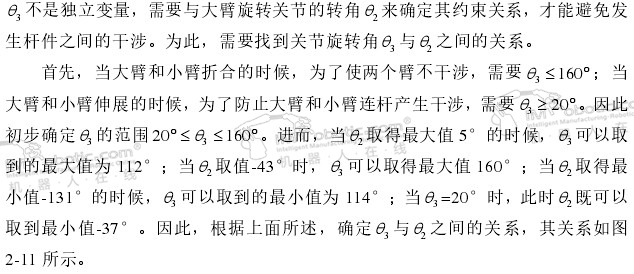
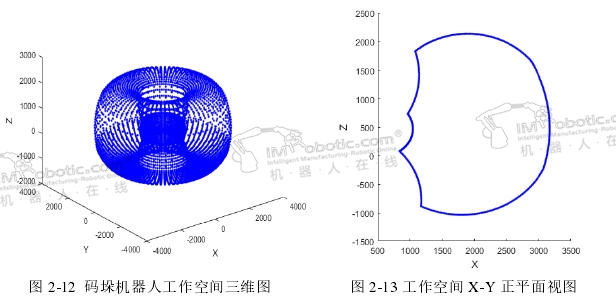
(4)根据大臂、小臂关节运动角度关系,针对取值范围边界随机取点,得到工作空间的边界曲线,绘制在X-Y正平面的工作空间图。
由正运动学计算可知:

已知码垛机器人的腰部旋转关节的转角范围、大臂旋转关节转角范围和小臂旋转关节转角范围,以及相互之间的约束关系,通过Matlab对各关节变量随机赋值并将结果可视化显示,完成三维工作空间求解,得到的码垛机器人三维工作空间如图2-12所示;x-y正平面的边界曲线如图2-13所示。
2.5本章小结
本章完成了对码垛机器人的构型的简化,并分析得出关节、杆件之间的约束关系,建立了码垛机器人运动学模型,利用D-H参数法建立了码垛机器人的连杆坐标系,完成码垛机器人的正逆运动学分析;借助Matlab机器人工具箱、Adams软件完成码垛机器人的模型构建,完成正逆运动学、运动轨迹的验证,结果表明运动学求解的正确性;根据大臂关节转角与小臂关节转角之间的运动关系,通过正运动学公式,使用蒙特卡洛法完成了机器人工作空间的求解,得到码垛机器人工作空间的三维云点图,以及提取边界点得到在X-Z平面的工作空间边界图。


好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









