





基于ROS的码垛机器人运动仿真及轨迹规划中建立码垛机器人的树形结构

3.2.1建立码垛机器人的树形结构
首先根据上一章中,以简化的机器人模型建立机器人的URDF文件。因为ROS中的URDF文件主要对于树形结构的机器人支持较好,对于有闭合链的结构不能友好的支持,需要对码垛机器人的结构进行简化,去除其平行四边形结构,将小臂与手腕连接处的关节设为主动关节,该关节只在虚拟平台中作为主动关节使用,以正确模拟简化之后机器人模型末端位置姿态的变化,在码垛机器人的实际控制中,该关节没有电机驱动,其姿态是由平行四边形机构保证,既保证末端水平姿态。
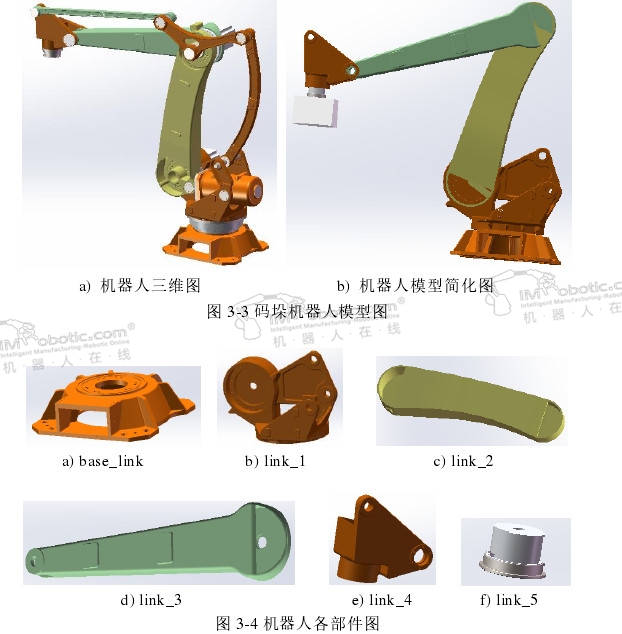
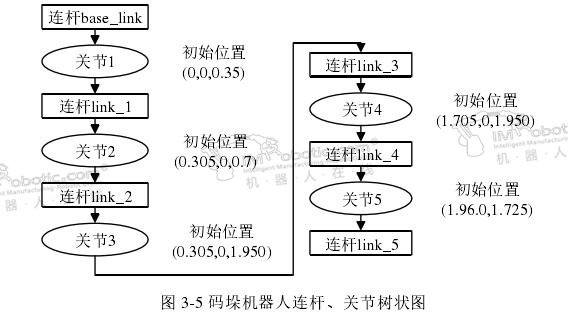
本文以哈尔滨工业大学机器人所智能服务机器人实验室自主设计与研发的4自由度码垛机器人作为基本模型,通过SW软件完成机器人的三维装配图,如图3-3示为码垛机器人三维模型,然后针对机器人模型进行简化,一方面可以简化URDF文件的创建步骤,另一方面可以减少ROS中RViz对模型3D仿真的加载时间。因此,去除配重块、螺栓等不必要的零件,只保留主要的杆件并且保证各杆件之间的相对位姿关系,分为以下6个部分,既底座、腰座、大臂、小臂、腕部以及末端部件,如图3-4示。
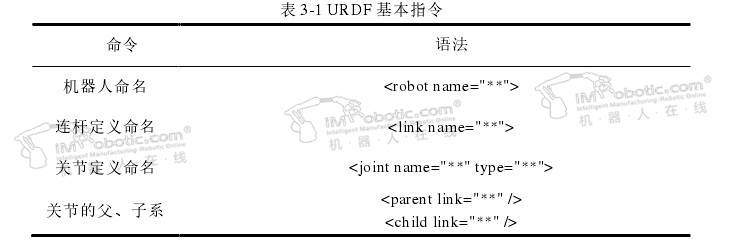
对码垛机器人各个部件划分之后,需要对上面划分的各部件模型进行编程语言描述。为实现URDF文件对机器人模型的描述,需要对机器人的连杆(Link)和关节(Joint)两个基本的元素进行定义。连杆与关节之间的关系如图3 -5所示,在仿真的过程中,可以通过控制关节节点状态实现对模型的控制。
3.2.2模型的建立与导入
在URDF文件中,其基本命名指令如表3-1所示,连杆的参数是由<link>定义,包含杆件的名称、坐标系位置姿态、质量、惯性中心、形状以及颜色等内容;关节的参数是由<<joint>定义,包括关节命名、类型、位置姿态坐标、关节连接的父子系杆件、关节限位角度、最大速度以及力的控制大小等内容,通过描述连杆和关节参数,在ROS构建码垛机器人模型的框架。
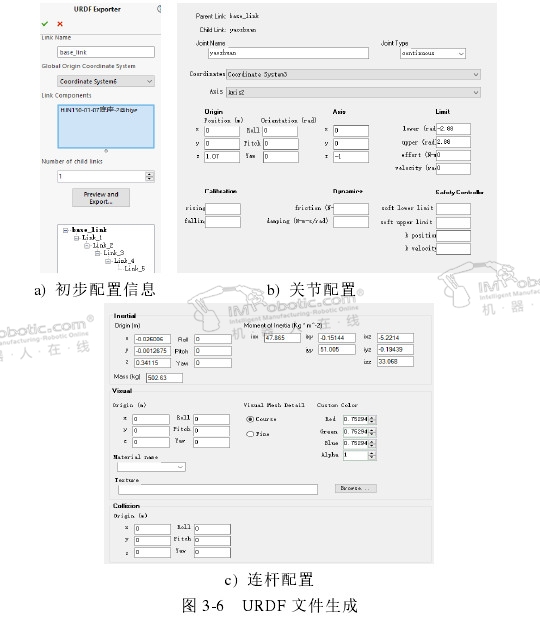
借助于Solidworks中的sw2urdf插件可以快速完成码垛机器人三维模型的解析。在转换之前,首先配置好各部件之间的配合关系,保证在移动某一个部件时,码垛机器人不会出现部件脱离的现象;然后通过在Solidworks中添加参考轴以及坐标系的方法为码垛机器人各个关节配置坐标系以及旋转轴。然后通过图形交互界面,如图3-6所示,手动输入每个连杆的名称、参考坐标系、关节名称与类型、关节旋转轴以及选择该连杆所包含的全部组成零件;输出文件的过程需要对输入与选择的关节信息和连杆信息的确认与补充。首先对于关节信息,确认输入信息的正误,以及补充各个旋转关节的角度运动范围,关节转动速度范围、可承受力矩的范围、摩擦系数等参数;然后对于连杆信息,添加连杆的颜色、材料名称类型等基础属性,以及补充连杆干涉碰撞的检查信息等。


好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









