





基于ROS的码垛机器人运动仿真及轨迹规划中URDF文件的校验

3.2.3 URDF文件的校验
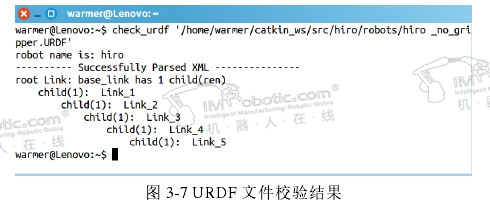
完成了URDF的编译,针对于模型建立的连杆关节之间的联系是否正确,可以通过ROS中的check_ urdf这个简单的命令来分析所创建的码垛机器人结构是否存在语法错误等。如果没有错误,其结果如图3-7所示。可以得知,其与图3-5中码垛机器人的树形结构一致,既URDF文件正确性得以保证。
3.2.4 Rviz 3D可视化工具
机器人技术的发展,促进了仿真器功能的快速发展。RViz是ROS中的3D可视化工具,是一个在ROS中显示机器人实体三维模型的工具,但是其本身没有有运动仿真的功能,需要提前安装arbotix模拟器,通过arbotix模拟器可以实现机器人的运动仿真功能。ROS作为一个开源的次级操作系统平台,将arbotix模拟器的仿真结果通过RViz可视化工具交互显示。RViz通过矩阵变换的方法来实现固定坐标系和目标坐标系之间的数据转换。固定坐标系是用于描述世界的参考坐标系,一般情况下,固定坐标系不能够相对于世界移动。目标坐标系一般是描述相对于摄像机视角的参考坐标系。例如,如果目标坐标系为地图,可以在RViz中观察机器人相对地图移动;如果目标坐标系是机器人的底座,那么该机器人将会被固定在某一位置,而其它的物体相对于该机器人进行移动。
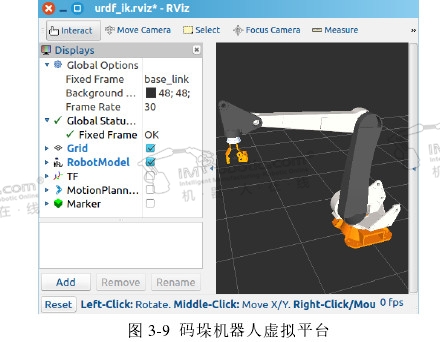
在ROS中可以使用RViz实现机器人的显示功能,需要在ROS工作空间下面建立工作包,用于URDF文件的存储以及编译,完成RViz显示程序以及启动文件的编译,通过运行RViz可视化平台,实现码垛机器人的三维模型显示,如图3-8所示为命令窗口显示的运行信息;如图3-9所示为码垛机器人在RViz平台中的三维仿真模型。
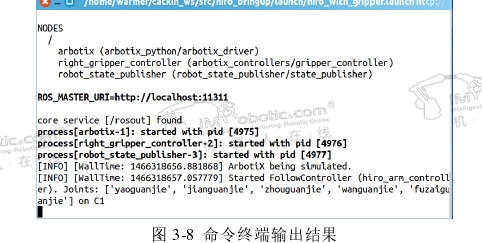
通过图3-8可以发现,ROS系统目前己经运行了arbotix模拟器驱动程序节点、机器人抓手控制节点以及机器人状态发布者节点(robot_state_publisher),显示该机器人关节轨迹控制器(Fo1lowControllers)的名称和其所控制的各关节名称。在RViz界面中的显示如图3-9所示,可以看出,其模型与solidworks中的三维模型一致。由图3-9可知,在RViz中左侧窗口是对于要显示模型的控制命令窗口,包括坐标系、机器人杆件显示、轨迹规划、颜色调整等内容,右侧是视图调整功能,例如观察机器人模型的俯视图等。
通过在ROS中建立运动仿真模型,可以更方便直观的观察控制的准确性,方便完成程序代码的调试工作,而且还可以实时了解码垛机器人的工作状态。


好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









