





一种混联机翼喷涂机器人轨迹规划与控制系统开发主要研究内容
时间:2017-08-29
阅读:6236

1.3本文主要研究内容
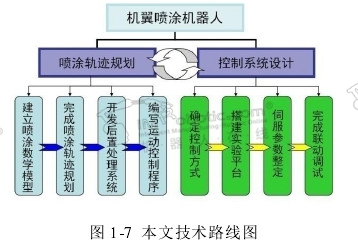
本课题来源于中国商飞、江苏长虹集团和清华大学联合研制的一款串并混联机翼喷涂机器人,主要研究内容包括两大方面:喷涂机器人的轨迹规划与控制系统开发。其中,轨迹规划的展开是建立在喷涂涂料沉积模型和喷涂工艺的即基础上的,通过轨迹规划得到的数据需要对其进行后置处理之后才能运行于开发的控制系统上,而后置处理的核心是喷涂机器人运动学分析。本文技术路线如图1-7所示,这些研究内容紧密联系,构成了本文的脉络。
全文共有六章,每个章节的主要研究内容如下:
第一章为绪论,探讨了国内航空制造业领域喷涂工艺的现状,阐述了本文的研究价值与意义。从国内外喷涂机器人的发展状况入手,总结了国内外机器人结构、喷涂轨迹规划以及控制系统的研究与发展。
第二章解释了旋杯式静电喷涂的原理与特点,采用有限分布范围模型中的β分布模型建立了静电旋杯喷涂沉积厚度模型,对喷涂过程中影响涂层质量的参数:喷涂高度、喷涂速度和相邻路径间距进行了仿真分析,确定了适合机翼喷涂的最佳参数取值。
第三章分析并对比了人工示教编程和离线编程,确定机翼喷涂机器人采用离线编程的方式;借鉴了CAD/CAM技术,基于CATIA数控加工模块制定了机翼喷涂轨迹;在VS2010平台下以C++为开发语言,开发了基于工件STL模型的轨迹规划软件;经过仿真分析观察喷涂效果,证明了两种规划方式都能够完成轨迹规划的任务。
第四章分析了机器人后置处理的原理与任务,对喷涂机器人结构展开了研究,将喷涂机器人中的并联机构等效为串联机构,进而采用D-H法求解了机器人运动学正逆解;开发了后置处理软件,将轨迹规划软件输出的喷涂轨迹位姿信息转换成了喷涂机器人各轴的运动数据。
第五章制定了机翼自动喷涂控制系统的总体方案;运动控制系统方面,选择了“IPC+UMAC+PWM放大器”的控制模式,并完成了控制器、驱动器、伺服电机以及编码器的选型工作;制定了输调漆系统、防爆防撞系统方案;基于UMAC完成了运动控制软件和系统监控软件的开发;完成了系统伺服参数整定工作,系统响应性能测试,验证了本文研究开发的控制系统的可靠性。
第六章总结了全文的主要研究内容,对后续的工作提出展望。

喷涂机器人
一种混联机翼喷涂机器人轨迹规划与控制系统开发
技术干货

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









