





混联机翼喷涂机器人轨迹规划与控制系统开发模型的建立与喷涂工艺分析(上)
时间:2017-08-29
阅读:7391

第二章喷涂机器人模型的建立与喷涂工艺分析
机翼喷涂中最重要的是要确保机翼表面的喷涂质量,涂层厚度是否在要求范围之内并且均匀一致。喷涂工艺参数是影响喷涂质量的核心因素,所以这就需要建立合适的静电喷涂模型来研究工艺参数对于涂层质量的影响。本章将从静电旋杯的工作原理和特点分析入手,建立合适的静电喷涂厚度沉积模型,进而对喷涂工艺参数与涂层厚度之间的关系展开研究。
2.1旋杯式静电喷涂的工作原理
目前工业上采用的喷涂方式有很多种,根据雾化之后的涂料在工件表面的沉积原理不同,可以将喷涂方式分为空气喷涂、无气喷涂、混气喷涂、等离子喷涂、以及静电喷涂等类型。在这些喷涂方式中,高速旋杯式静电喷涂由于涂料分布均匀、喷幅和流量可以控制、涂料传递效率高、涂料雾化效果好、喷涂安全性高等优点,己经成为汽车生产领域最广泛的涂装方式。对于航空制造中的喷涂工件而言,静电旋杯喷涂无论是在喷涂质量和涂料利用率方面,还是在工艺参数集成化管理和安全性方面也是最适合机翼喷涂的方式。
静电喷涂的原理:首先将涂料微利雾化,然后利用带电颗粒在电场的作用下向着与其电荷极性相反的电极方向移动的现象,使雾化的涂料微粒在直流高压电场中带上负电荷,在静电场的作用下,这些涂料微粒将流向带正电荷的工件表面,最后被中和沉积成一层均匀的薄膜,牢固地附着在工件表面。旋杯式静电喷涂如图2-1所示,其中1表示涂料输送系统,2代表高压气体输送系统,3是内置高压静电发生装置,4是高速旋杯, 5是待喷涂工件。
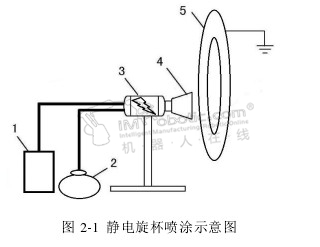
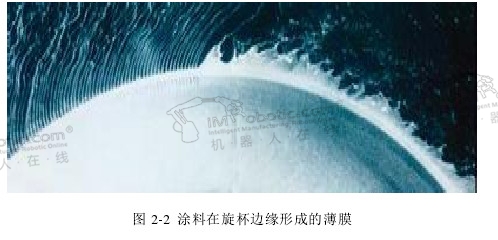
静电旋杯工作流程如下:涂料输送系统1和高压气体输送系统2将涂料和高压气体输送至高速旋杯,其中涂料通过旋杯内部集成的高压静电(最高可达到-50~120kV)发生装置3而带上负电荷,在高速旋杯内部有一个尾部带有空气涡轮的转子,2输送的高压气体通过一根空心轴来驱动转子高速旋转,进而驱动旋杯4高速运转,通往空气涡轮的高压气体的压力越大,旋杯的转速越快,反之气体压力越小,旋杯转速越慢。空载时旋杯的转速最高可达60000rpm,带有载荷时旋杯转速30000-40000rpm。在如此高转速下,其提供的强大离心力将涂料抛甩到旋杯锐利的边缘,抹成均匀的薄膜状态,如图2-2所示,此时抛甩出来的携带负电荷的涂料微粒向四周扩散,受到强电场力的分裂作用,进一步雾化成微粒子。接着这些携带了负电荷的涂料微粒在电场力的作用下迅速向导极性工件5吸附中和,于是涂料便均匀、牢固地吸附在工件表面。喷涂机器人

喷涂机器人
一种混联机翼喷涂机器人轨迹规划与控制系统开发
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









