





光幕喷涂机器人之控制系统设计
时间:2017-09-14
阅读:8194

第5章控制系统设计
5.1系统需求分析
5.1.1系统控制过程
喷涂机器人在喷涂作业过程中,喷漆路径规划中形成的数据以及喷枪的轨迹描述是基于门外形的坐标系,且门为静止状态。实际工作时,喷枪的控制是依据喷漆机器人的坐标系,同时按照一定的速度移动,因此必须完成包括平面空间坐标转换、喷枪轨迹控制坐标转换以及运动补偿等工作。
喷漆路径需要将喷涂对象的绝对坐标系转换为喷涂机器人的相对坐标系。根据轨迹规划出的最优解,并依据喷涂对象与喷漆机器人之间的相对关系,转换成机器人运动坐标系下的轨迹。两个坐标系间的相对关系参数由检测传感器与机器人安装参数决定。而后,由于喷枪安装于控制臂上,其在空间的直线运动通过需控制臂的移动实现,角度需通过控制喷枪的两个转动电机实现,故在机器人控制时,喷枪的喷漆路径,也即喷枪喷头的位置参数需要转换成喷枪控制臂的前端参数。最后基于喷漆轨迹的分析是依据喷涂对象静态情况下得出,当实际工作时喷涂对象会按照一定速度运行,且喷枪启动与停止都需要一定的时间,故必须在轨迹控制中,需把运动速度与运动约束进行补偿,得到实际可以执行的控制轨迹。
然而,在进行坐标转换后,喷涂机器人还需采用合适的控制方式以及控制算法等,使五轴形成联动从而驱动喷涂机器人运动机构运行。并带动作为末端执行器的喷枪按照轨迹规划模块运行。
5. 1 .2系统总设计
基于喷涂机器人控制过程,并结合机械结构与五轴机电执行系统单元分析,机器人控制系统采用一个控制器对各轴同时控制的形式。指令输入信号通过控制器处理后下发至各单轴控制系统,最终形成机器人平台端点空间位置行走轨迹。
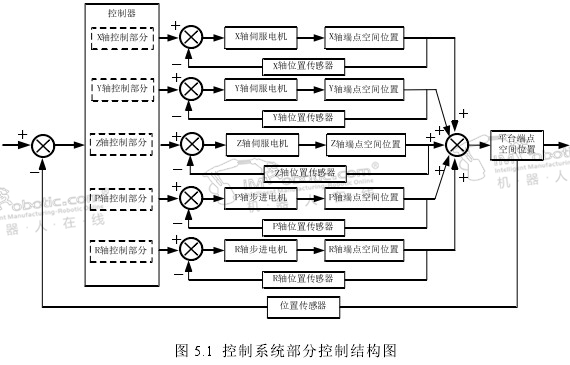
输入信号与机器人平台端点空间控制反馈信号对总控制器进行信号输入,总控制器中对信号加以算法处理后由X轴控制部分、Y轴控制部分、Z轴控制部分、P轴控制部分、R轴控制部分对其各自控制部分进行信号输出,并与各自对应轴传感器反馈回的位置信息一同做执行器输入,最终由各轴空间位置输入完成机器人平台端点空间位置输出,并且该信号同时由位置传感器反馈于控制器。
系统总设计具体情况如下图5.1所示,
5. 1. 3主要解决内容
针对此过程分析,故针对五轴喷涂机器人控制系统及其控制结构设计中,其主要需求有:喷涂机器人稳定,可维护性高,成本低。
在控制核心的选择问题上,主要有PLC(可编程逻辑控制器)和运动控制卡两种。然而,在确保稳定性前提下,就成本而言PLC比运动控制卡便宜很多,PLC比运动控制卡更适合控制成本。故针对五轴伺服控制系统,对PLC作为喷涂机器人的核心控制系统的可行性进行研究。
主要解决内容为:
(1)测试PLC是否能稳定灵活有效的进行程序编写及修改;
(2)对于多轴联动协调控制,研究合适算法适用于当机构带上负载后,实现PLC控制在某一时刻同时将各个电机转动到预定位置的定位控制;
(3)研究机构带上负载后开始运行,利用PLC控制实现在满足精度指标的前提下提高响应速度。

喷涂机器人,基于光幕的喷涂机器人系统设计与研究
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









