





关于AGV搬运机器人之通信方式选择
时间:2017-09-18
阅读:18515

2.2.3通信方式选择
在实际物流仓储中,搬运机器人作业的环境是占地面积比较大的仓库,需要多台机器人共同执行搬运任务,作业人员使用仓储物流中心的终端下达指令,调度控制各个机器人的搬运任务,同时机器人在移动中也需要向上位机发送相关状态信息,因此使用的通信方式为无线通信方式。
无线通信方式主要有ZigBee通信、蓝牙通信以及WiFi通信技术。
(1)ZigBee
ZigBee是一种基于IEEE802.15.4标准指定的局域网协议,主要运用于近距离传输环境,是一种低速率的无线通信技术。这项技术的优势在于使用时候功率耗损较低并且价格低廉,被广泛使用在智能家居控制,医疗器械控制和安全消防等地方。
(2)蓝牙
蓝牙(Bluetooth)是一种适用于短距离数据传输的无线技术。主要用于移动电话,免提耳机和智能手环之间等短距离通信设备。
(3)WiFi
WiFi ( Wireless Fidelity)是一种适用于中长距离数据传输的无线技术,携带信息传输相当快,覆盖的范围十分广(4l ],并且可以添加中继产品扩大使用面积。故本文选择WIFI通信方式作为机器人与上位机终端通信的方式。具体形式如图2.4所示。

2.3仓储搬运机器人机械结构概要设计
2.3.1总体构造设计
仓储搬运机器人构成主要包括搬运机器人本体底盘结构、举升机构和携带的传感器等。搬运机器人本体底盘机构是主骨架,主要是支撑机器人整体结构,由于仓储物流搬运机器人主要用在物流配送中心的搬运作业中,因此需要加强底盘结构的强度,使用钢板作为底板,可以提高机器人的刚度。外壳类似于皮肤,保护机器人内部部件,机器人举升机构是机器人执行搬运举升的关键部件,机器人所携带的传感器保证机器人可靠地行驶。机器人结构示意图如图2.5所示。

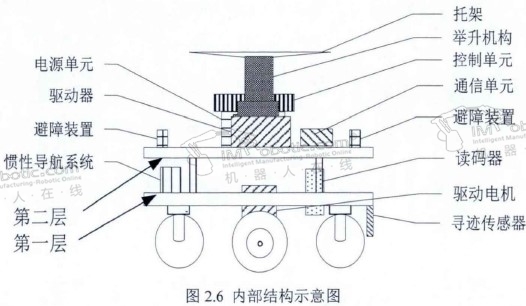
仓储搬运机器人内部结构示意图如图2.6所示。仓储物流搬运机器人采取潜入式设计,主体支架由上下两层组成。其中主要包括避障装置、驱动装置、导航定位单元、控制单元、通信单元、举升机构等关键部件。控制单元、避障装置、举升机构放置在底盘第二层,驱动装置、导航定位单元放置在底盘第一层。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









