





关于AGV搬运机器人之驱动方式选择
时间:2017-09-18
阅读:12926

2.3.2驱动方式选择
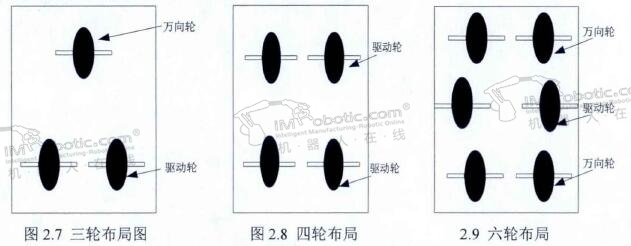
当前搬运机器人主要驱动方式有两轮驱动和四轮驱动,其中两轮驱动有三轮布局如图2.7所示(一个万向轮和两个驱动轮)、四轮布局如图2.8所示(两个万向轮和两个驱动轮),此方式成本相对较高并且结构比较复杂,并且控制相对较难,主要适用于特殊环境作业的机器人。故本文采用两轮驱动的方式。鉴于需要提高仓储搬运机器人承载重物的能力,因此选择使用4个万向轮分担负载,如图2.9所示,为两轮驱动方式配合四个从动粉的六轮设计。
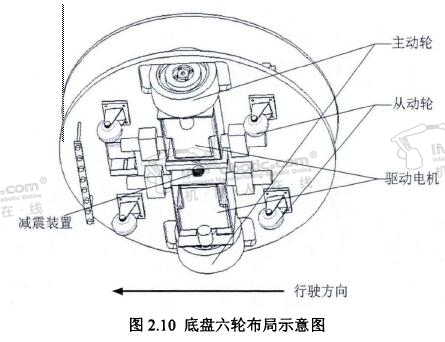
如图2.10所示,为本文设计并使用的仓储搬运机器人的底盘,机器人的两个驱动轮对称置于底盘中心的两侧,两驱动轮分别与两个电机相连接,用来提供动力。驱动机构是采用了带减速箱的无刷直流电机。从动轮可以被驱动机构带动做全方向运动。其中编码器通过支架固定在两个直流电机下,随搬运机器人车轮的转动而转动,用于记录下搬运机器人车轮转动的圈数,并反馈给微控制器。其减震弹簧,置于车体底盘结构底盘中间,两端与直流电机的外壳相接触。当遇到路面不平时候,搬运机器人一个主动轮被迫抬起或凹陷的时候,由于中间弹簧的张力,使车体底盘相对平稳,从而起到减震作用。
.jpg)
搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









