





AGV搬运机器人之底盘传感器安装位置设计(上)
时间:2017-09-19
阅读:14812

2.3.3底盘传感器安装位置设计
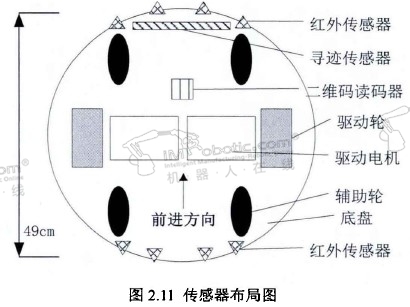
仓储搬运机器人底盘直径为49cm,在机器人底盘安装的部件除了驱动轮、从动轮及驱动电机以外还有导航定位模块与安全避障模块的传感器,如图2.11所示为机器人底盘传感器主要布局图,灰度循迹传感器用于地面寻线,作为仓储搬运机器人控制系统冗余系统,可以提高机器人行进路线的精度。二维码读码器被安装在底盘中心靠前的位置,用来读取含有二维码信息的二维码地标,方便机器人定位。其中置于地盘第二层前后两端的红外传感器作为防止机器人发生碰撞的保护装置。
2.3.4外壳设计
外壳作为仓储搬运机器人的皮肤,可以对机器人内部器件起到保护作用。本文使用Solidworks软件进行对仓储搬运机器人外壳的模型进行设计。通过3D打印技术,使用3D打印材料PLA打印机器人的外壳。设计如图2.12所示。

2.4仓储搬运机器人控制系统核心部件选型
2.4.1运动控制模块选型
仓储搬运机器人运动控制模块包括机器人行走驱动模块与举升模块。因此运动控制模块选型围绕这两部分展开。
(1)电机选型
电机是机器人的执行部件,主要使用的电机分为三种:步进电机、交流伺服电机和直流电机。步进电机无需反馈信号,控制结构简单,但较难实现高性能控制。交流伺服电机采用交流电供电方式,不适合现代物流环境下仓储搬运机器人的使用。因此本文选用直流无刷电机作为机器人运动的执行部件。无刷直流电机构造简单、响应速度快、控制方式简单,并且运行时调速效果好。
根据上述计算,并结合仓储物流搬运机器人实际使用环境,最终选用图2.13和2.14所示为中大力德(ZD)公司的圆轴型直流无刷电机ZSBLD 120-24A-25S以及配套的圆轴减速器ZSBLD 120-24GN-50S。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









