





agv搬运机器人之控制系统硬件电路设计
时间:2017-09-20
阅读:19921

3仓储搬运机器人控制系统硬件电路设计
仓储搬运机器人控制系统的硬件电路是算法和软件实现的基础,本章以模块化思想进行仓储搬运机器人控制系统硬件电路的设计。
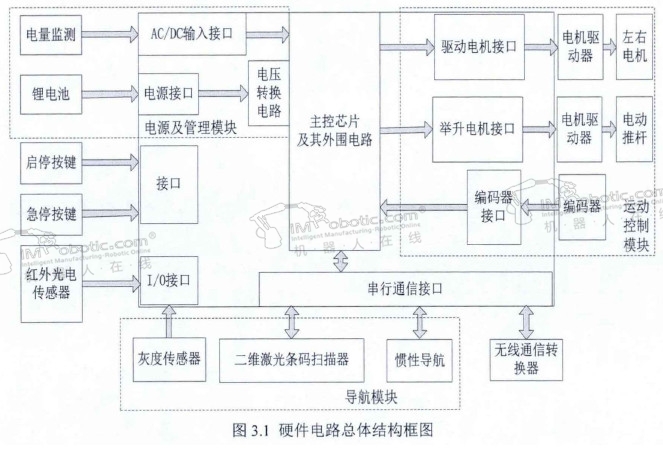
3.1控制系统硬件电路总体组成结构设计
本文将控制系统划分为如下模块,包括电源及管理模块、运动控制模块、导航模块等仓储搬运机器人扮制系统各个模块接11之间的关系如图3.1所示。
3.2最小系统电路设计
3.2.1主控芯片选型
主控芯片是AGV控制系统的核心,芯片选型直接关系到整个控制系统性能的好坏。芯片选型需要考虑MCU的内存、运行速度、端口资源、功耗、成本、未来需求和兼容性以及开发环境等方面。本文选择TT公司的MSP430F5438作为主控芯片,其实物如图3.2所示,该芯片具有以下特点:
(1)功率消耗少。芯片的电源电压在1.8V}3.6V之间,具有4种超低功耗工作模式。
(2)处理程序的能力强。MSP430采用了精简指令集的结构,并且含有丰富的寻址方式,内含大量的寄存器,片内的数据存储器都可以参加运算。
(3)成本低。相对于DSP, FPGA等芯片而言,MSP430F5438单片价格只要20多元,价格较低。
(4)开发调试环境方便。TI公司为MSP430平台提供设计支持,有JTAG接口,可以在IAR软件中完成编程、编译、调试等开发过程。
(5)片内资源十分丰富。系统时钟频率最高可达25MHZ,其中芯片内部集成了15个定时/捕获比较单元和高达16个外部中断,多个引脚可以复用。
因此MSP430F5438的功能完全符合仓储搬运机器人控制系统功能实现的需求。

3.2.2 MCU引脚资源分配
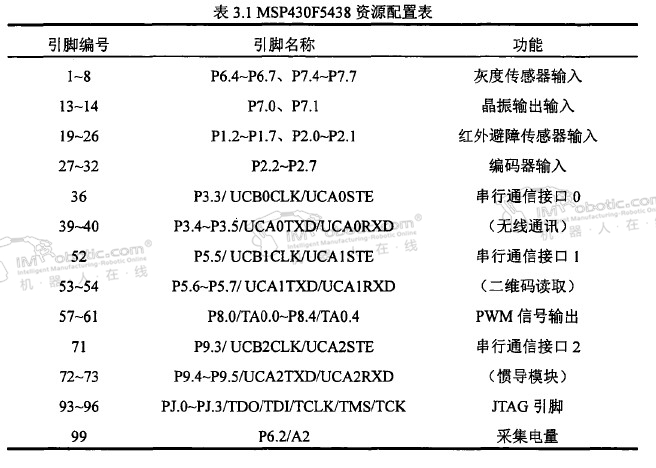
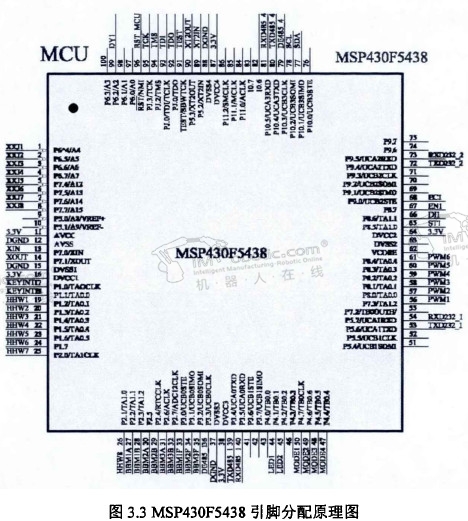
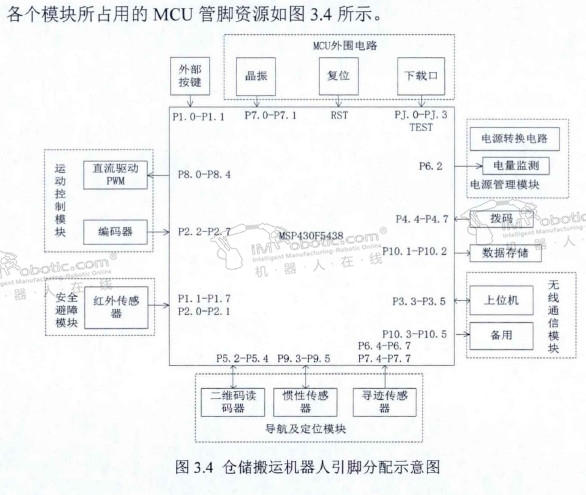
通过对芯片MSP430F5438数据手册的查阅,并考虑引脚功能,对片内资源进行了详细分配,具体分配如表3.1所示,芯片引脚分配原理图如图3.3所示。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









