





agv搬运机器人之MCU时钟电路设计
时间:2017-09-20
阅读:9356

agv搬运机器人之MCU时钟电路设计
3.2.3 MCU时钟电路设计
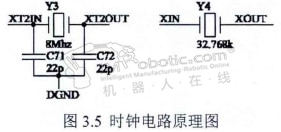
MCU的时钟源就像嵌入式单片机的脉搏,没有时钟信号,单片机是无法正常工作的。MSP430f5438含有5个时钟源,包括:XT1(低频振荡器),VLO(内部低频振荡器),REFO } DCO(内部RC振荡器),XT2(高频振荡器)。XT1具有两种工作模式LF(低频模式)和HF(高频模式),低至32768Hz的标准源时钟,也可以配置4MHz-32MHz高频模式。XT2产生高频时钟信号XT2CLK,工作形式与 XT1的高频模式相类似。
文中的控制系统同时使用了两个外部晶振,其中高频时钟源XT2CLK外接8MHz晶振,低频时钟源XT1 CLK接32.768kHz晶振。图3.5为时钟电路原理图,两端分别与输入(IN )、输出(OUT)相连接,系统内利用电容通高阻低的特性,使用2个22pF的电容提高晶振的可靠性。
3.2.4 MCU复位电路设计
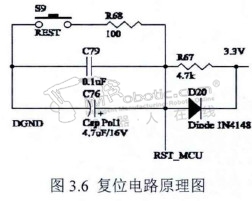
在MSP430F5438中,存在两种复位方式,分别为系统上电复位和手动复位。系统上电复位是通过复位引脚触发芯片复位信号,通电后芯片产生复位信号,电源达到稳定状态后,复位信号会被撤销。手动复位电路是为了防止在程序调试过程中,出现程序跑飞等情况而设置的。手动复位是利用按钮开关人为地在芯片复位引脚输入相应的脉冲,复位原理图如图3.6所示。复位键在没按下的时候,REST电压接近于3.3V,MCU的复位引脚RST低电平有效,所以系统正常工作,在按下按钮的过程中,电容释放之前的电量,REST两端的电压逐步降低,系统因此实现了手动复位。同时为了防止系统误动作,系统复位信号需要持续一段时钟周期,因此在设计过程中,在电路中添加坦电容,用来保证系统可靠复位。 搬运机器人

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









