





agv搬运机器人之电机速度信息采集程序设计
时间:2017-09-20
阅读:9109

agv搬运机器人之电机速度信息采集程序设计
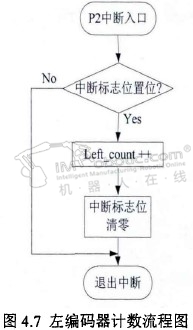
速度的采集通过所选编码器实现,本文所选用编码器为500线,即电机转过一圈输出500个脉冲,同时增加了减速器,减速比为1: 30,即电机转过一圈,驱动轮转过1/30圈。在中断服务子程序中,设置了变量Left_count. Light_count分别表示左右电机编码器输出的脉冲数,当接收到一个脉冲count就自动加1。同时设置了系统的采集时序,设置编码器采集的间隔t为15ms采集一次,通过单位时间的测量获得编码器移动的距离d,根据式(4.1)最终可获得机器人的速度信息。
计算流程如图4.7所示。
4.2.2二维码信息采集程序设计
在模拟搬运环境中,地面会贴有一张如图4.8所示的二维码地标供仓储搬运机器人定位使用。每个二维码标志携带有位置信息,机器人底部装有专门扫二维码的模块,扫描二维码获取地标信息从而获取位置信息,并通过串口传输给MCU。

二维码信息通过RS232串口进行读取,选用UART_A1模块进行数据的传输,设置波特率为115200bps,其向MCU传输数据的格式如表4.1所示。
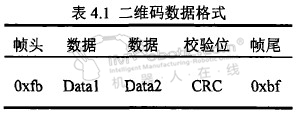
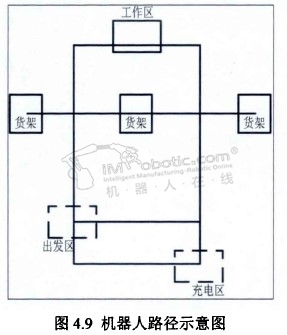
其中数据1为二维码对应的位置信息,如0x01, 0x02, 0x03等;数据2为二维码对应的是否存在货架,存在货架则为0x01,否则为0x00。如果检测到为货架信息的地标,则机器人需要原地旋转1800,并等待举升机构的动作。如图4.9所示为仓储搬运机器人模拟路径示意图二维码则需要放在搬运机器人行进路面即可
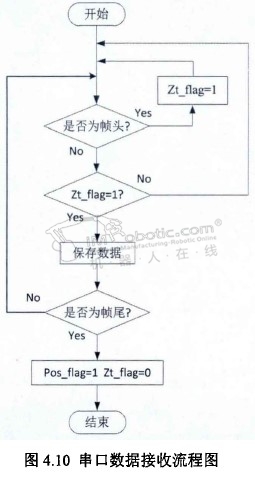
使用二维码串口接收数据时,一次中断读取一字节数据,将读取的数据保存在CAxRXBUF接收缓冲寄存器里。首先判断接收到的数据是否为帧头,如果是则将Zt_flag置为1。如果不是帧头,继续判断Zt_flag是否为1。如果Zt_flag不为1,等待下一次数据接收中断,如果Zt_flag为1,保存数据,继续判断数据是否为帧尾。如果不是帧尾,等待下一次数据接收中断,如果是帧尾,Pos_flag置为1,并且清除Zt_flag的标志,具体流程如图4.10所示。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









