





agv搬运机器人之惯性导航模块数据采集与处理程序设计
时间:2017-09-20
阅读:13581

4.2.3惯性导航模块数据采集与处理程序设计
本文通过RS232串口读取惯导器件Xsens中提取的偏航角信息,此信息用于仓储搬运机器人的惯性导航。
(1)定位算法设计
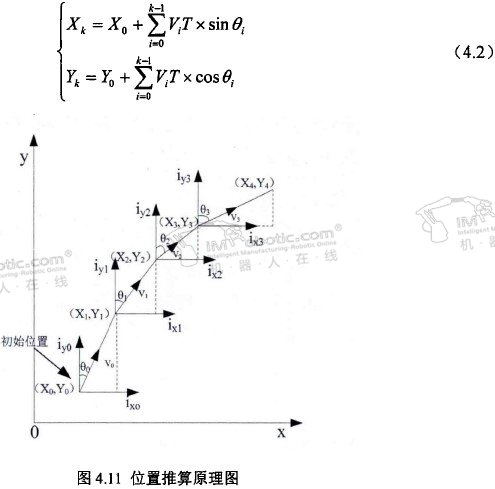
文中惯导信号的处理是指将惯导器件输出的偏航角信息与编码器采集的速度信息相融合,推算出仓储搬运机器人相对于行驶路线的偏移量。定时器可以每隔15ms采集一次,采集仓储搬运机器人速度与偏航角的信息,采集后对其进行累计推算。如图4.11所示,图中坐标系为机器人导航坐标系,由于惯导采样频率远远高于机器人移动位移姿态变化的频率,假设采样时间间隔为T,机器人在极短时间内航向角的变化很小,近似为零,每段的速度近似不变,分别为Vo. V1...Vk。点(X0,Y0 )、( X1,Y1)、( X2,Y2 )… ( Xk,Yk)处的偏角为θ0、θ1、θ2……θk,可推算各点的位置如下。鉴于惯导模块有累积误差,如果不加以矫正,行驶的方向会向一个方向一直偏差。
(2)位置误差计算
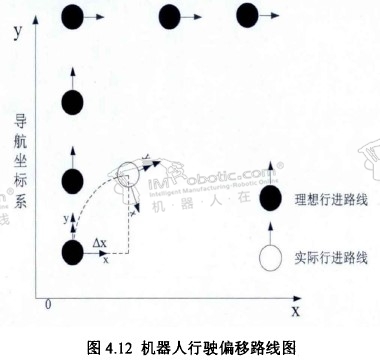
如图4.12所示,假设仓储搬运机器人向其本身坐标系的Y轴的前进方向行驶,可以得到机器人行进偏移路线的误差值为机器人的质心方向在x轴方向的投影0x。在机器人移动过程中,如果能够预测机器人下一个点的位置偏移量,并对机器人位置偏移量进行矫正,搬运机器人的运动控制就具有了一定的前瞻性。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









