





agv搬运机器人灰度循迹模块数据采集与处理程序设计
时间:2017-09-20
阅读:12792

4.2.4灰度循迹模块数据采集与处理程序设计
(1)位置信息采集
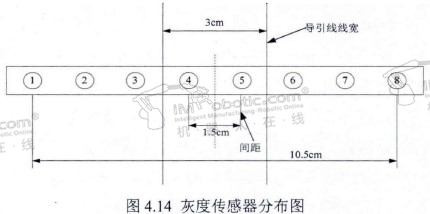
仓储搬运机器人装有一排共计8位的灰度传感器,如图4.14所示,其中每隔2位传感器的间隔是1.5cm,一共可以检测10.5cm宽的引导线,而使用过程中引导线宽度为3cm。灰度传感器输出方式为数字电平输出,即可通过MCU的I/O口读取信息,检测到黑色或深色线时输出高电平,检测到白色或浅色为输出低电平。
(2)位置误差修正
首先将8个灰度传感器从左向右分别编号为1}8号,当机器人沿中心循迹时,第4,5号的灰度传感器肯定能够检测。并且第3, 6号灰度传感器是不被检测到。然后灰度传感器扫过到引导线时,传感器会输出高电平信号,MCU首先统计高电平输入信号的编号,之后取高电平信号编号的平均值,算出后减去平均值4.5。这样判断机器人是否偏移,然后进行误差修正。
(3)循迹信号处理
灰度循迹根据单个传感器返回的值,统计之后得到机器人相对于导引线位置的偏移量,流程图如图4.15所示。首先读取灰度的高低电平,统计高电平个数,取平均值之后与4.5做差,若偏差为0则表示机器人中心在黑色寻迹线上,若偏差<0,搬运机器人向右偏移,若偏差>0,则向左偏移,通过拄制左、了;电机的转速,纠正误差。


搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









