





agv搬运机器人组合导航算法设计
时间:2017-09-20
阅读:10686

4.2.5组合导航算法设计
仓储搬运机器人在行进过程中,地面不是全部覆盖导引线,而是粘贴了二维码地标,因此以惯导模块为基础配合速度信息的导航算法存在一个明显优势是其可以不接收外界信息而进行自动导航,因此在没有导引线的情况下机器人也能在仓储路面上行进。但是在运行过程中惯性模块存在缺陷,会不断累积误差,因此机器人长时间行驶时,惯导模块对位置的推算是不精准的。为了解决这一问题增加了冗余的思想,对地标进行改进,在原有的二维码基础上添加一小段导引线,利用灰度循迹对机器人的姿态误差进行修正,即修正机器人偏航角误差。因此,在运行过程中仓储搬运机器人需要处理好惯导与灰度传感器两者的使用才能优化机器人行进路线。
如图4.16所示是仓储搬运机器人模拟行驶路线的简易图,其中二维码与二维码之间的间隔是1.5m。由图可见,机器人行进路线主要完成两种,一种是直线行驶,另一种是原地转弯。因此机器人可以在到达二维码地标时,根据二维码信息和所写程序进行判断机器人行讲路线的信息。

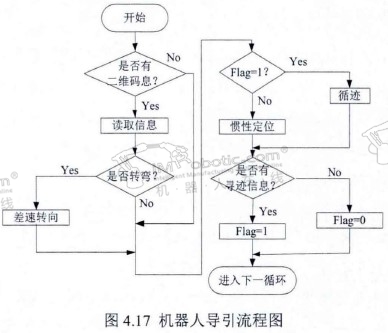
综合上述使用的算法,机器人组合导引流程如图4.17所示。机器人在运行过程中会一直读取二维码地标,检测二维码地标的信息,当检测到二维码信息后,跟程序中的地址比对,根据对比信息判断机器人位置是否为所搬运货架行进路线上的地标,同时判断是否需要转弯同时上传二维码信息。之后,开始判断导引方式。其中Flag标志位判断机器人是否检测到导引线,若Flag标志位置1后,则表示检测到导引线,仓储搬运机器人进入寻迹导引的方式;若Flag标志位置0后,仓储搬运机器人则进入惯性器件导引。当搬运机器人确定了行进导引方式之后,会继续判断是否存在导引线,若检测到则将标志位重新置位,若没有,则Flag标志位清零。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









