





agv搬运机器人之避障模块信息处理程序设计

4.2.6避障模块信息处理程序设计
若有障碍物遮挡,则红外避障传感器将输入信号,触发I/O口中断,相应的中断标志位置位,表明搬运机器人的前方有障碍物,需要紧急停止。因为所用的电机驱动器拥有紧急制动的I/O口输入端,只需要MCU分配一个普通I/O即可,一旦红外标志位置位,则控制驱动器的紧急制动I/O口使机器人急停。当红外传感器检测不到反射回的信号时,机器人继续沿设定路线前进。
4.2.7电源电量信息采集程序设计
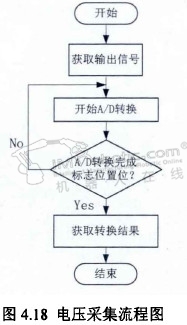
电压采集信号在ADC 12数模转换模块中实现,用单通道单次转换的方式进行信号的传输,通过ADC 12中的通道A2进行采集转换。流程如图4.18所示,分配时序为每隔50ms将转换后的电压信息匹配成对应的电量信息发送给上位机。
4.3运动控制模块软件设计
对于仓储搬运机器人来说,运动控制主要包括两个方面:一方面是对机器人的速度和方向进行控制,即对机器人的驱动轮控制。另一方面是对举升机构的控制,即对电动缸的控制,实现货架的举升。
4.3.1电机转速闭环控制算法设计
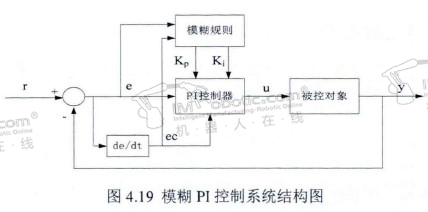
传统的电机闭环控制算法一般使用PID控制, PID控制的控制效果取决于KP,Ki,Kd这三个参数,一旦这三个参数固定后,在整个控制过程中将无法改变。PID控制技术使用成熟,结构简单,但是负载变化及外部干扰容易造成被控系统参数的改变,难以满足仓储搬运机器人实际控制系统的要求。因此机器人电机控制使用模糊PI控制算法对转速进行闭环控制。模糊PI控制系统结构图如图4.19所示。
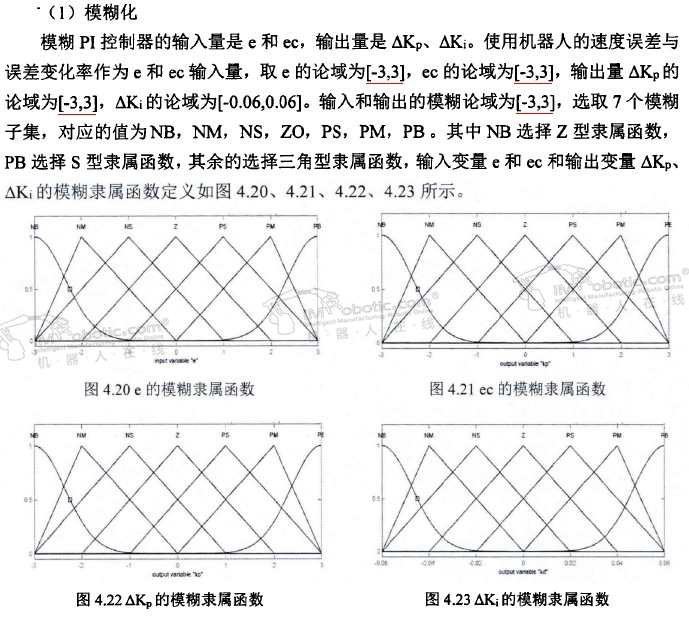
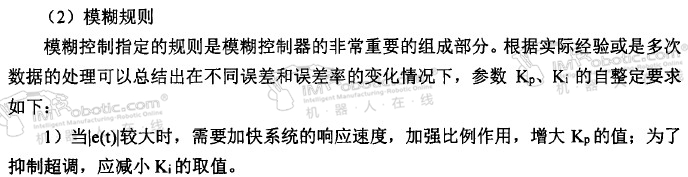

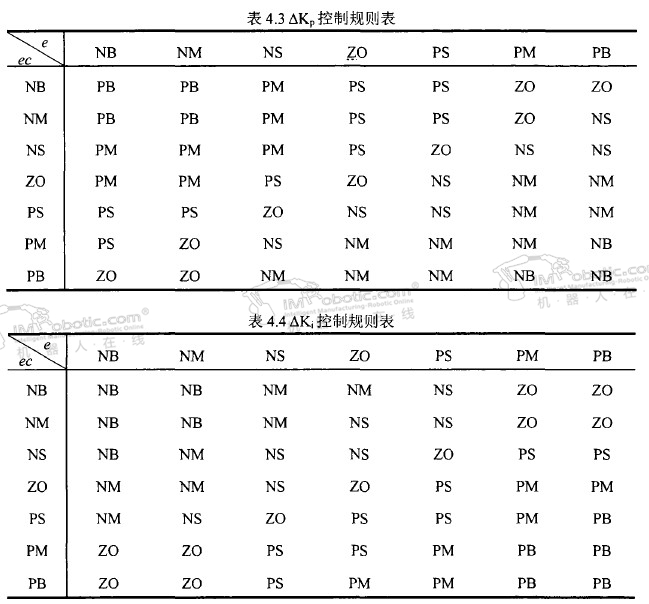
(3)模糊推理与去模糊化
本文选用Mamdani型的模糊逻辑推理,“与”算法为取小,“或”算法为取大,
“蕴涵”算法为Mamdani取小,综合为各条规则结果的模糊子集取“并”,去模糊的方法选用面积中心法
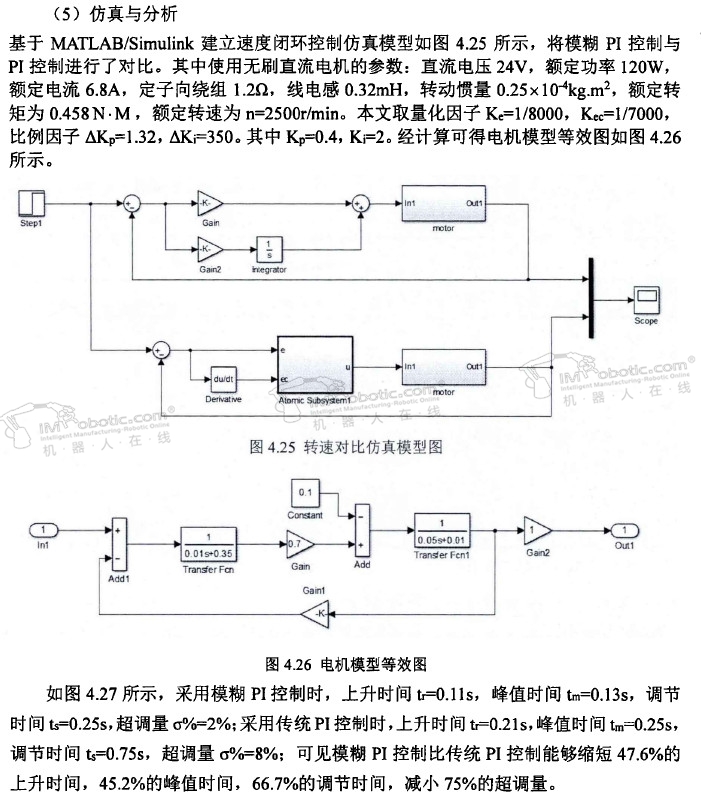
(4)模型搭建
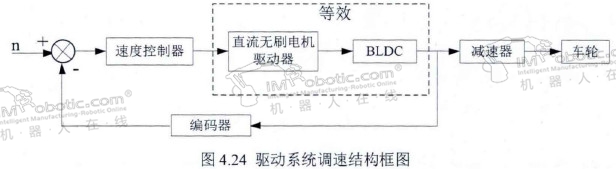
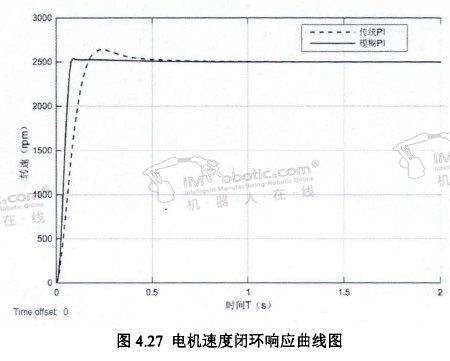
无刷直流电机作为仓储搬运机器人驱动系统的核心部件,其驱动系统调速框图如图4.24所示。本文将直流无刷电机驱动器和BLDC等效考虑,采用二阶系统近似代替实际无刷直流电机的模型。


好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









