





agv搬运机器人之电机速度控制模块设计(上)
时间:2017-09-21
阅读:10612

4.3.2电机速度控制模块设计
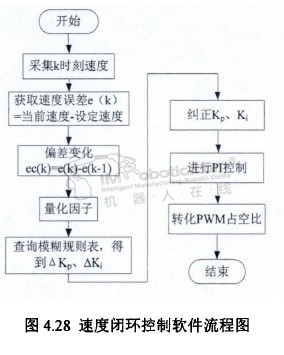
设定搬运机器人速度采集与控制周期的时间为15ms。由于机器人采集到的信号是离散信号,而程序中需要使用模糊PI控制方法进行电机的控制。软件实施流程图如图4.28所示,其中k-1表示上次的控制量。
4.3.3电机方向控制算法设计
(1)机器人运动系统模型分析
仓储搬运机器人的驱动方式为两个驱动轮驱动的方式,因此转向方式可以为差速转向。首先对其运动模型进行建模,模型如图4.29所示。
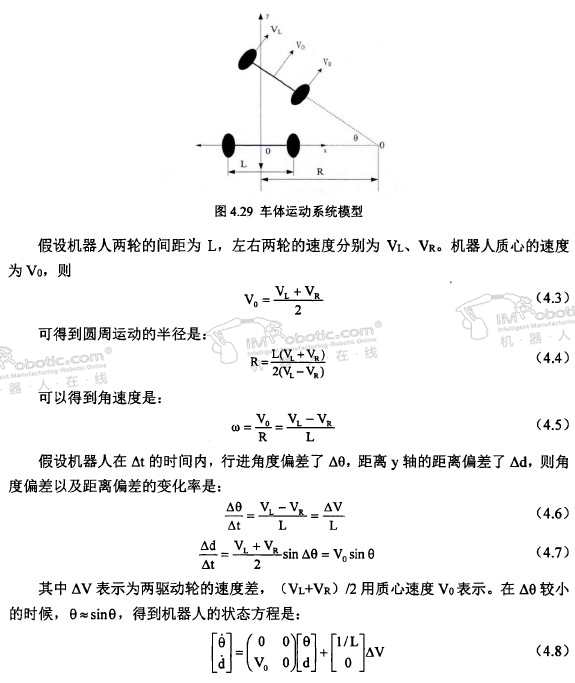
通过所建立搬运机器人的运动模型可以知道,理论上在机器人沿直线运动的时候是不存速度偏差;若左右两轮存在一定速度差的时候,机器人行进路线变现为圆弧的运动;当VL=-VR的时候,机器人则进行原地转圈的运动。因此当机器人存在位置偏差的时候,通过调整机器人两轮的速度差△V可以控制机器人位置的偏转角度。
(2)差速转向控制算法设计与仿真
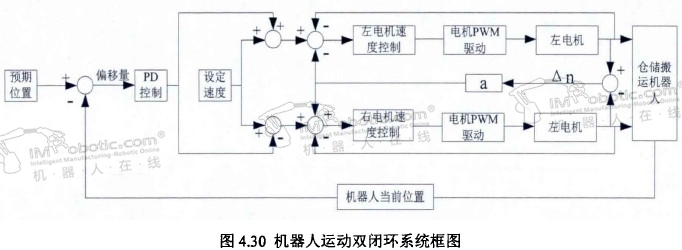
如图4.30所示为仓储搬运机器人整体运动的双闭环系统框图。机器人使用的惯性导引以及灰度循迹方式均可以输出机器人位置的误差信息,本文采用PD控制算法,通过将位置误差信息输入PD控制器得到两电机的速度修正量使两个电机之间产生差速的控制。与此同时将每个电机的转速差乘以一定的反馈系数a放大之后传递给左右电机实现速度差的控制。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









