





agv搬运机器人之举升电机控制程序设计
时间:2017-09-21
阅读:11356

4.3.4举升电机控制程序设计
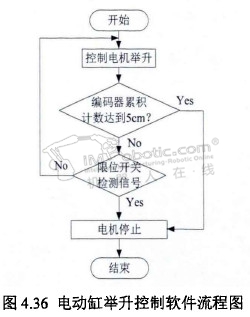
在仓储搬运机器人举起货架行走中,举升机构是必不可少的模块。机器人通过用电动推杆将货架举起。其中所用到的电动推杆是将电机与电动缸的传动丝杆通过联轴器相连接,将电机的转动转化为推杆的上下直线运动,其中使用的编码器经计算可反馈电动推杆伸缩的长度。
本文使用的电动推杆伸缩量可以达到Scm,其速度最大为2,CI17}S,对电机的控制使用位置闭环控制,通过编码器的脉冲数计数反馈电动推杆上下移动的距离,由于电动推杆本身自带限位开关,当电动推杆触碰限位开关时,电机会停止转动,作为保护。具体流程如图4.36所示。
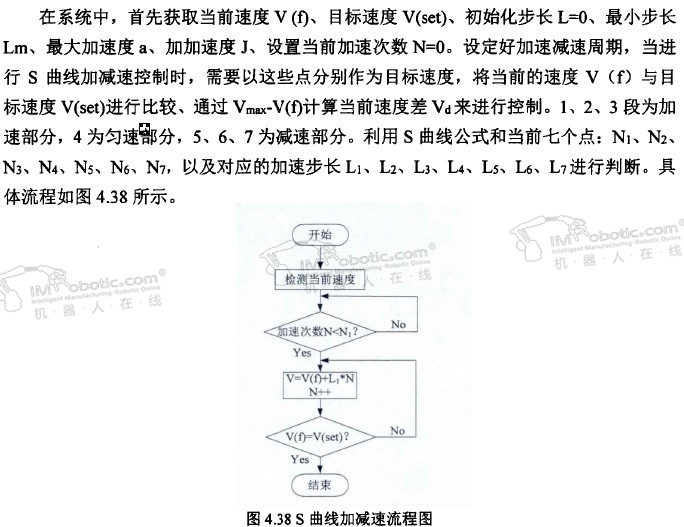
4.3.5 S曲线加减速算法设计
驱动电机在机器人运动过程中需要频繁启停,电机在启动和停止过程中,频率产生突变,如果机器人速度控制不好容易造成货架上货物的倾覆,同时会影响机器人电机及其机械结构,最终会导致关键部件使用寿命的减小。因此需要考虑用平滑的加减速控制电机平稳启动和停止,减少冲击对搬运机器人器件的损害。本文采用S曲线加减速的控制方法对电机进行控制。如图4.37所示,将加减速的过程分为7部分:1加加速部分,2匀加速部分,3减加速部分,4匀速部分,5减减速部分,6匀减速部分,7加减速部分。本文中考虑1, 3, 5, 7段运行的时间相同。
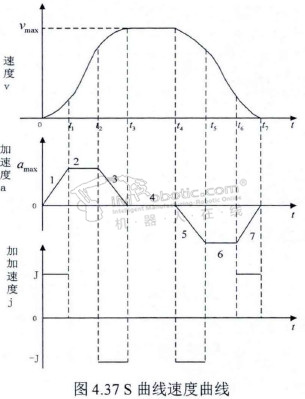
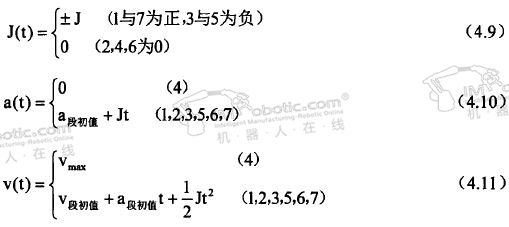
如下为各部分的加加速度、加速度、速度计算。其中J (t)为加加速函数,a (t)为加速度函数,v(t)为速度函数。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
18

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









