





agv搬运机器人之无线通信模块软件设计(下)
时间:2017-09-21
阅读:9985

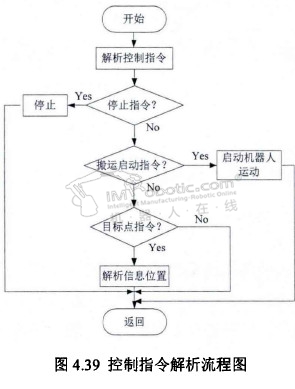
仓储搬运机器人在接收完控制指令后,需要对其中的控制指令进行解析和处理,具体流程图如图4.39所示。
(2)机器人发送指令
如表4.7所示为仓储搬运机器人发送的状态信息的数据帧格式,其中数据1表示为机器人的编号;数据2表示为机器人当前的位置信息,即当前采集到的二维码定位信息;数据3表示为经单片机处理后的机器人速度信息;数据4表示为电量信息;数据5表示为机器人举升状态信息,0x00表示电动推杆未运动,0x01表示电动推杆在运动,0x02表示电动推杆运动完成,数据6表示为机器人状态,其中0x10为正常运行状态,0x11为异常运行状态,0x00正常充电状态,如果机器人在异常状态则需检查机器人状态。发及时发送数据帧给上位机。

4.5本章小结
本章完成了仓储搬运机器人控制系统软件的设计。包括主控模块的设计、初始化模块的设计、中断模块的设计、数据采集模块的设计、运动控制模块的设计和无线通讯模块的设计。介绍了软件总体工作流程并给出了各部分的详细流程图。采用模糊PI控制算法对机器人两电机速度进行控制,采用S曲线加减速算法对机器人启停过程进行平滑控制,采用PD控制算法对搬运机器人方向进行控制。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









