





agv搬运机器人之运动控制模块调试(上)
时间:2017-09-21
阅读:9954

agv搬运机器人之运动控制模块调试(上)
运动控制模块的调试,需要确定控制芯片能否正常输出PWM波形,电机是否能够正常运转,以及编码器能否能够正常返回信号。
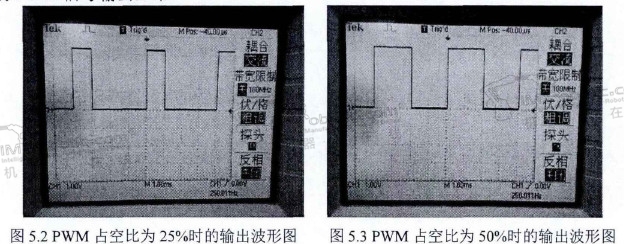
通过编写程序观察定时器输出PWM的波形图,验证不同占空比情况下输出信号波形是否正确以及电机转速是否有变化。如图5.2和5.3所示,分别为PWM占空比是25%与50%时候的示波器显示波形,通过示波器方波可以看出输出波形是正确的,判断控制板的PWM信号输出正常。
将直流电机与驱动器对应的端口相连,设置PWM频率是250Hz,将PWM输出占空比分别从25%调至50%,观察直流电机的运行情况。可以看到占空比从20%逐渐增加到50%过程中,电机转动速度逐渐变快,可以判断直流电机控制正常。之后通过控制驱动器IN3端口的高低电平,观察电机是否正转、反转,从而判断电机正反转正常。
5.1.3导航定位模块调试
导航定位模块的调试分为三部分,分别为灰度寻迹传感器测试、二维码扫码器测试和惯导模块测试。
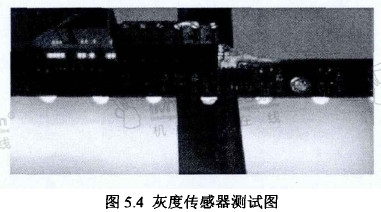
首先,检测灰度寻迹传感器是否能够辨别黑色导引线。将灰度传感器放置在黑色导引线正上方,如图5.4所示。通过示波器测量检测灰度寻迹传感器引脚输出的电平信号,可以观察到传感器的第四、第五引脚在寻迹线上方输出高电平信号,在白色区域的其他引脚输出低电平信号,可以判断灰度寻迹传感器模块工作正常。另外,在调试中需要扭动传感器上端的旋转按钮,可以调节检测灰度寻迹传感器灵敏度。 搬运机器人

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









