





笛卡尔坐标型码垛机器人伺服系统的选型(上)
时间:2017-09-26
阅读:9071

笛卡尔坐标型码垛机器人伺服系统的选型(上)
伺服电机和伺服驱动器组成的运动单元是自动化领域比较常用的驱动设备,它的主要特点有低频特性好、响应速度快、控制精度高、过载能力强等。伺服电机通过自带的编码器可以反馈电机轴转过的角度,从而与伺服驱动器一起构成半闭环系统,实现无极调速、精确定位和转矩控制。
1、腕部伺服电机选型
腕部伺服电机位于机器人手臂的最前端,其作用是驱动手抓的旋转。电动机旋转时的阻力矩包括摩擦阻力矩和负载的惯性阻力矩,其中摩擦阻力矩很小忽略不计。通过UG的高级质量管理功能,计算出手爪部分的转动惯量为3.84E-2kg*m2 ,码垛对象为长、宽、高分别为400mm、200mm、150mm质量为20KG的长方体,由长方体转动惯量计算公式:
其中,a为货物长度,b为宽度。可得货物相对于腕部电机轴的转动惯量为0.333kg*m2。则总的转动惯量为0.371kg*m2。根据码垛机器人工作速率要求设定腕部旋转的最大速度为0. Brad/s,最大角加速度为2.Srad/s2。则可计算出腕部电机轴回转力矩为1. 04Nm。腕部电机选择松下MSME022G1型电机,减速器选择上海浩祯PLS70型减速器,其具体参数如表4.1, 4.2所示:
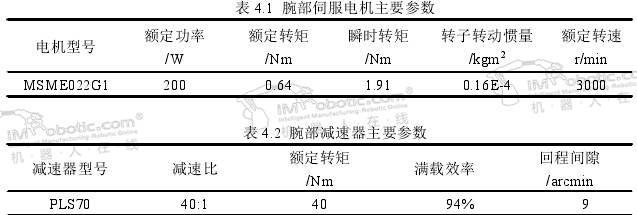
由表4.1, 4.2可以得出,腕部伺服电机的额定转矩大于驱动负载需要的最大转矩,满足转矩要求。腕部负载等效到电机输出轴的转动惯量与电机转子转动惯量之比为14.3,松下MSME022G1型电机手册中要求等效到电机输出轴的转动惯量与电机转子转动惯量之比小于20,因此满足惯量匹配要求。 码垛机器人

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









