





笛卡尔坐标型码垛机器人伺服系统的选型(下)
时间:2017-09-26
阅读:9649

笛卡尔坐标型码垛机器人伺服系统的选型(下)
2、腰部伺服电机选型
腰部伺服电机主要作用是带动除底座之外的整个机器的旋转,其旋转时所受的阻力矩包括摩擦阻力矩和惯性阻力矩。通过UG的高级质量管理功能,计算出腰部的转动惯量为42.453kg*m2。根据码垛机器人工作速率要求设定腕部旋转的最大速度为0.8,最大角加速度为2.Srad/s2。则可计算出腕部电机轴回转力矩为106.13Nm。根据上述分析,腰部电机选择松下MDME152G1型电机,减速器选择上海浩祯PLS115型减速器,其具体参数如表4.3、表4.4所示:

由表4.3 , 4.4可以得出,腰部伺服电机的额定转矩大于驱动负载需要的最大转矩,满足转矩要求。腰部负载等效到电机输出轴的转动惯量与电机转子转动惯量之比为8.3 ,满足惯量匹配要求。
3,竖直和水平伺服电机的选型
水平伺服电机的作用是带动滚珠丝杠转动,使码垛机器人末端产生水平方向的位移,其旋转时所要克服的阻力包括各个关节的自重、摩擦以及驱动末端手爪产生水平方向的加速度。为了得到准确的数据,使用 ADAMS对机器人三维模型进行动力学仿真,设定水平方向最大速度为0.4m/s,最大加速度为0.8m/s2;竖直方向最大速度为0. 3 m/s,最大加速度为0.6m/s2。通过仿真,得到竖直、水平方向丝杠螺母受力随时间的关系如图4.7所示。
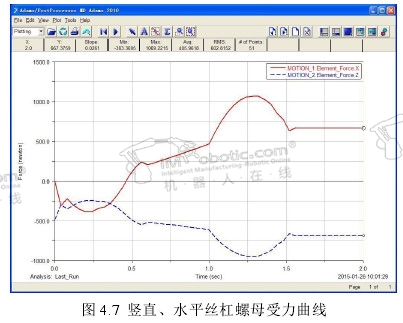
由图可知,竖直方向丝杠螺母受到的最大推力为950N,水平方向丝杠螺母受到的最大推力为1069N。根据滚珠丝杠传动的特点,可知丝杠螺母受力与电机轴输出转矩的关系为:
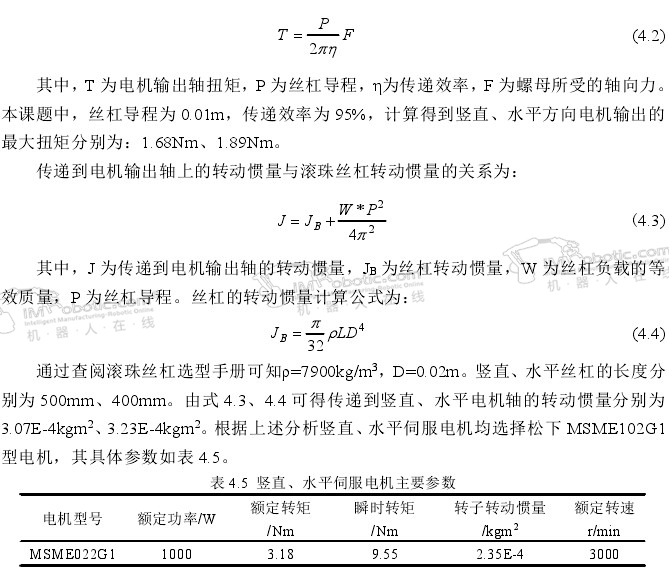
由表4.5可以得出,伺服电机的额定转矩大于驱动负载需要的最大转矩;竖直、水平方向负载等效到电机输出轴的转动惯量与电机转子转动惯量之比为1.31, 1.37,满足惯量匹配要求。因此,选取该型号电机完全满足设计要求。 码垛机器人

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









