





笛卡尔坐标型码垛机器人硬件的接线与通讯(下)
时间:2017-09-26
阅读:8925

笛卡尔坐标型码垛机器人硬件的接线与通讯(下)
4.4.3触摸屏与PLC的通讯
NB系列触摸屏与主机的通讯方式主要有三种,即RS232C, RS485, RS422A。其中,RS232C为现在主流的串行通信接口之一,广泛用于计算机串行接口外设连接。由于存在共地噪声和不能抑制共模干扰等问题,RS232C只能用于15m以内的点对点通信。RS485采用差分信号负逻辑,一般用两线制的接线方式,通信最大距离为500m,但是RS485只能半双工工作,接收和发送信号不能同时进行。RS422A为四线制,拥有单独的接收和发送通道,适用于点对多的全双工通信。
结合以上分析,本课题中触摸屏与PLC的通讯采用RS232C接口,这种通信接口的连接方式如图4.10。
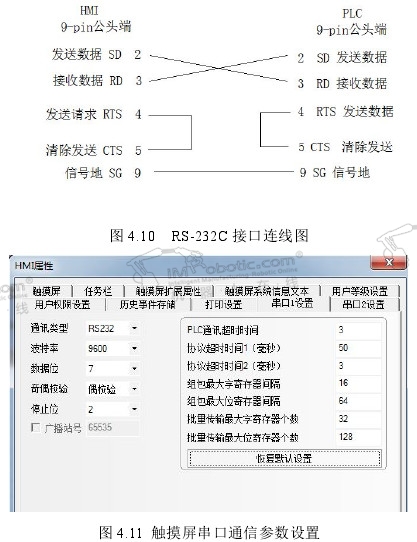
此外,为了保证通信成功,控制器和触摸屏串口通信的波特率、校验位、数据位、停止位必须一致。在本课题中,波特率设置为9600,偶校验,数据位为7,停止位为2。如图4.11所示为触摸屏的串口参数设置。
4.5本章小结
本章提出了码垛机器人的总体控制架构,确定了以可编程控制器作为主控制器,伺服运动单元作为从控制器的主从控制方案。通过深入分析本课题中码垛机器人的控制需求选出了主控制器、伺服电机、触摸屏、传感器等控制系统的硬件设备,最后设计了可编程控制器的I/O分配,以及控制系统中硬件设备的接线图、通讯接口连线图。
通过本章对码垛机器人控制系统方案的设计以及硬件的选型和接线图的绘制,使得码垛机器人整个控制系统有了硬件基础,同时也为后续的控制系统软件的设计搭建了平台。

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









