





CAD导航的焊接机器人离线编程系统实例验证
时间:2017-10-11
阅读:8289

.jpg)
第六章CAD导航的离线编程系统实例验证
为了验证本系统CAD导航焊接作业路径规划和CAD导航离线示教的可行性和正确性,分别用相贯线焊缝和Ω形焊接轨迹进行离线编程试验,一方面运用OTC的仿真软件FD on Desk进行了运动仿真,另一方面结合现有的设备—OTC ( AII-V6 )焊接机器人进行了离线程序的实际运行验证。
6.1焊接路径规划编程测试
对于复杂空间曲线焊缝的焊接加工,焊接机器人示教的精度和编程效率是一个很大的难题。例如相贯线焊缝,为非规则曲线,其形态随相交的两圆柱的半径变化而变化,即使同一曲线上焊缝位姿也随路径不断改变,在线示教耗时长、程序修改不便,一直困扰着在线编程。基于CAD导航的焊接机器人离线编程技术能有效的解决此类难题。本系统采用CAD导航进行焊接作业路径规划,能高效准确的完成复杂空间曲线焊缝的离线编程作业。其具体步骤如下:
1、 启动SolidWorks软件,选择离线编程系统菜单,打开程序界面(如图6-1)。

2、导入变位机构和待焊工件,并将工件安放在合理位置(如图6-2)。
在离线编程系统中充分利用机器人的工作区间进行变位机构的布局,便于机器人与机器人的协调工作。待焊工件应安放于仅通过一次装夹,机器人便能完成更多焊接任务的有利焊接位置,另外还应易于实现实际焊接的标定作业。

3、基于CAD导航进行焊接作业路径规划。根据待焊工件焊缝特征,进行焊接作业路径规划,主要分为以下两步:
第一、通过实体模型布尔运算在待焊工件中提取相贯线并进行均匀离散(如图6-3 )。

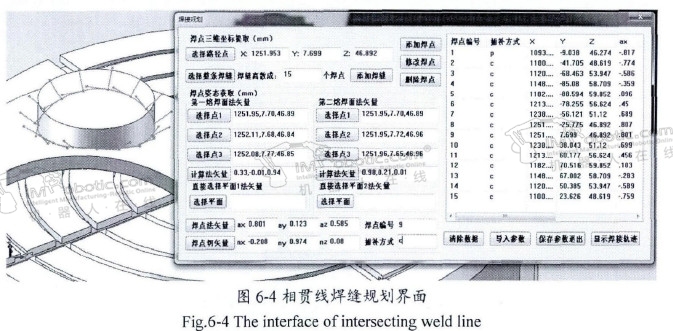
第二、提取焊缝关键路径点,建立焊缝关键路径点的位姿矩阵并设定插补方式(如图6-4。利用本系统开发的焊接规划界面能快速提取焊缝关键路径点并建立其坐标系描述。根据离散点的总个数,考虑焊接精度要求,采用圆弧插补拟合焊缝关键点之间的路径。
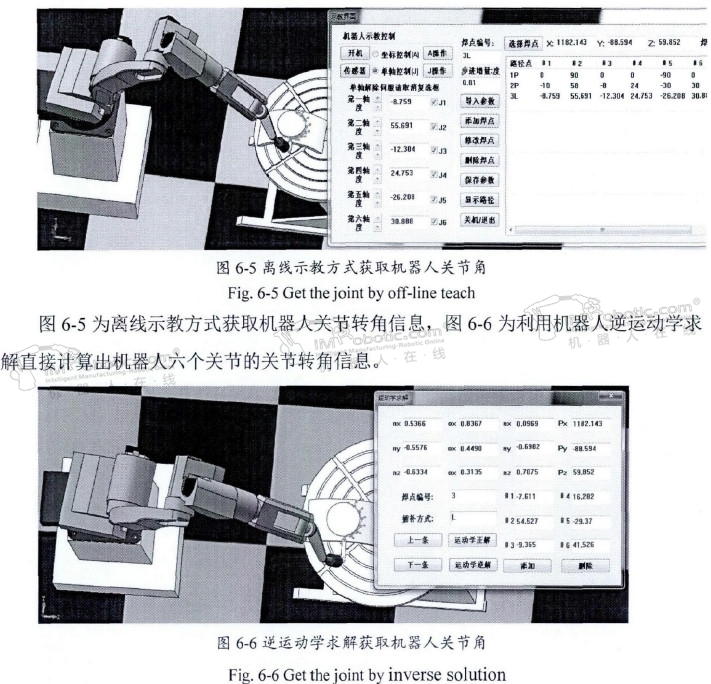
3、 根据焊接作业路径关键点的位姿信息、,利用离线示教或者机器人逆运动学求解生成机器人的关节转角信息。由于本系统尚未实现机器人与变位机联动,为保证机器人可达性和位姿良好性,先转化相贯线焊缝右侧七个焊接路径点。
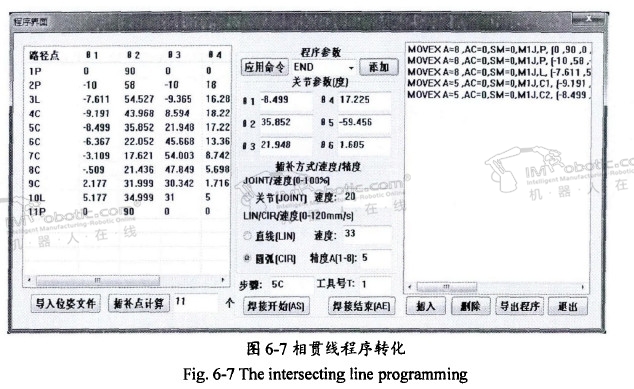
4、 运用系统的程序界面将焊接机器人关节转角信息转化为OTC机器人的控制代码如图6-7。本文生成的局部相关线代码见附录一。

焊接机器人,CAD导航的焊接机器人离线编程系统研究
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









