





实验喷涂机器人三大缺点及改进方案
时间:2017-10-18
阅读:15858


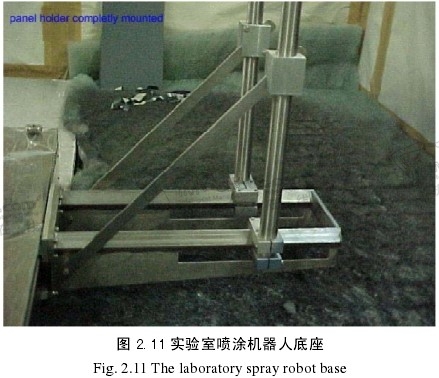
目前涂料研发实验室所使用的机器人为2自由度喷涂机器人,可以带动枪托上下移动和背板左右移动,底座不能使背板前后移动如图2. 11,在喷涂厚工件的时候无法调节喷涂距离,所以这台喷涂机器人只能用较薄的板材来做实验。由于是静电喷涂必须保证最佳喷涂距离,不能直接用汽车上的零件来做试验板材,影响颜色开发的竞精准性。
喷涂时加速度比较大,伺服电机带动同步带使背板和枪托移动容易产生振动,导致喷涂不稳定影响喷涂效果,从而影响颜色的开发。
喷涂时不同的喷涂程序,背板移动的速也不同,每个行程的速度是固定不变的,但是空载速度比较低,浪费有效了时间,影响喷涂效率。
通过分析实验室喷涂机器人的结构原理以及优缺点,提出喷涂机器人有以下几点需要改进:
①底座背板只能左右运动,改进可以前后运动可以调节喷涂距离;
②由于加速度比较大同步带运动不稳定,换成丝杠导轨副;
③空载运行速度太慢,进行空载提速。
综合各项指标,从技术、设备、人员、资金等各个方面出发,在与实际结合的基础上,拟定出本机器人主要技术参数和精度指标
①底座尺寸:长度:2424mm;宽度:470mm;高度200mm
②工件尺寸:宽度:100-800mm;高度100-900mm
③工作台承重:100kg
④工作行程:X=1620mm, Y=600mm, Z=1284mm
⑤最大移动速度:X=60m/min, Y=20m/min, Z=40m/min
⑥最小分辨率:lmm
⑦主伺服电机转速:0-2200r/min(无级调速)
⑧机器人的工作对象一部分是lcm以内的平板和厚度超过10cm的平面。
⑨验收时,要求机器人连续工作8小时,无故障,为验收合格。

机器人
喷涂机器人
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









