





码垛机器人关键机构静力学分析
时间:2017-12-05
阅读:7481

码垛机器人关键机构静力学分析
在实际设计中,在设计码垛机器人时,应该对机器人所有的零部件都需要进行静力学分析,校核每个零部件的刚度与强度,从而在机器人投入生产之前验证其合理性与安全性。然而,由于本文的篇幅所限,在这只分析几个重要部件的静力学分析。本章节验证了小臂、大臂以及基座的静力学分析。
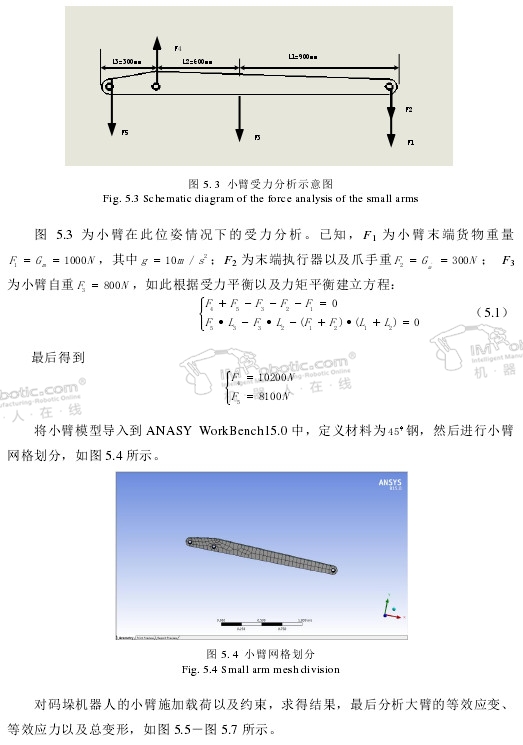
小臂静力学分析
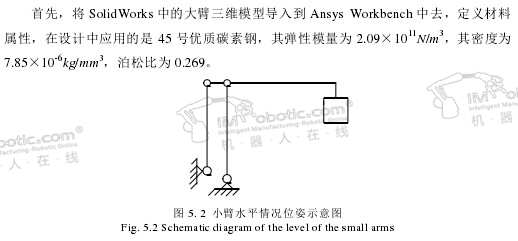
根据经验知道,当小臂处于水平状态,大臂处于处置状态时,小臂抓取货物时形变量最大,因此选择该位姿进行小臂的静力学分析具有很好的代表作用。如图_5 .2所示。
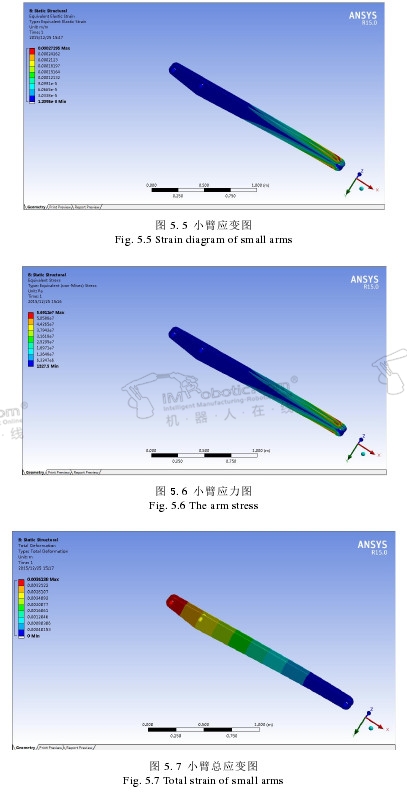
从上面图_5.6可以看出,最大的等效应力为_56.912MPa,而4_5号优质碳素钢的屈服极限为335MPa,抗拉强度为600MPa,所以此小臂的最大应力要远远小于其材料的屈服极限应力值,所以是完全符合强度要求。图_5._5和_5.7中最大的等效应变为0.273mm,总应变最大为3.61mm,所以机器人的精度完全不会受到影响,符合刚度要求。
基座静力学分析
基座是承载码垛机器人腰部以上的重量,包括传动机构、臂部机构、末端执行机构以及货物重量,显然可以知道,当小臂处于水平状态下,大臂处于垂直状态下,基座受到的力最大,且为垂直向下。己知货物1000N,小臂自重800N,末端执行机构为300N,大臂重为1000N,传动机构自重为1_SOON,总计重量为4600N。由于基座所承载的重量全部均匀施加在基座盖上,所以在进行静力学分析时将力分解成四个1150N分别施加在基座盖的四个方位,如图_5.8一图_5.9所示。

对基座进行网格划分,施加载荷约束后,得到基座的应变云图、应力云图以及总变形图,如图_5.10-图_5.12所示。
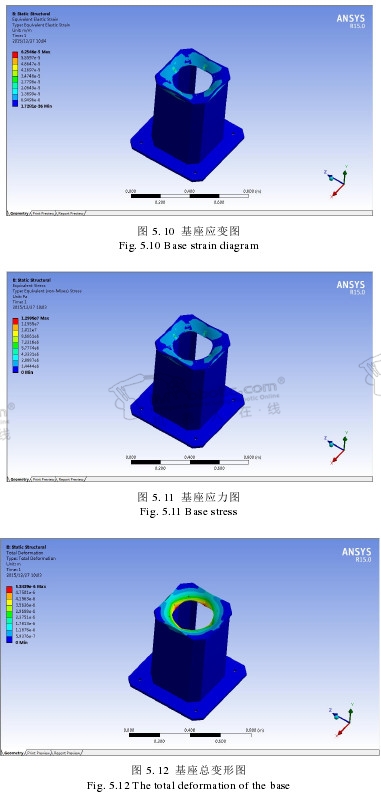
从上面3个图可知,基座本身没有太大的变形,变形最大的是基盖部件。右图_5.11可知,最大的应力为12.99MPa,从_5.10,_5.12可以看到0.0_56mm以及总变形为0.00_53mm,显然符合要求。
码垛机器人销轴静力学分析
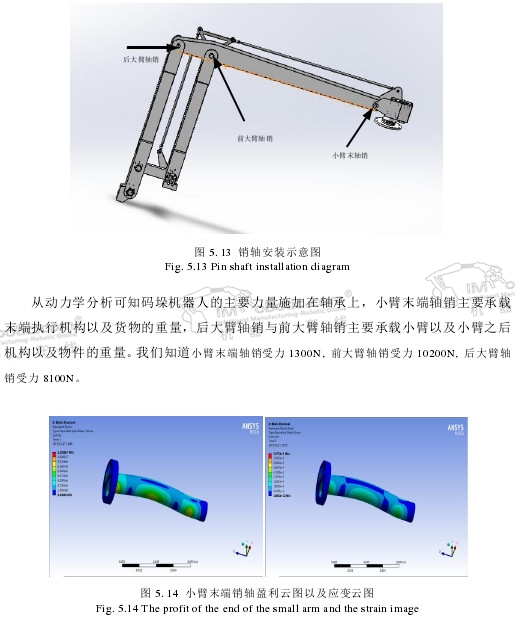
机器人的大臂、小臂以及末端执行机构都是通过销轴进行转动,所以对销轴上的静力分析很是有必要。图5.13为轴销安装示意图。
由表中可以看出,最大值均远远小于4_5号优质碳素钢的参数,所以完全符合刚度以及硬度的要求。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









